Warning
You are reading the documentation for an older Pickit release (1.10). Documentation for the latest release (4.0) can be found here.
Web interface
When a Pickit system is connected to an additional device and in a Google chrome web browser following address is typed in http://192.168.66.1, the user interface of Pickit shown. The user interface looks like the image below. In this article a general overview of what you can see in this interface is discussed. The interface is divided into 3 part: top, left and right.
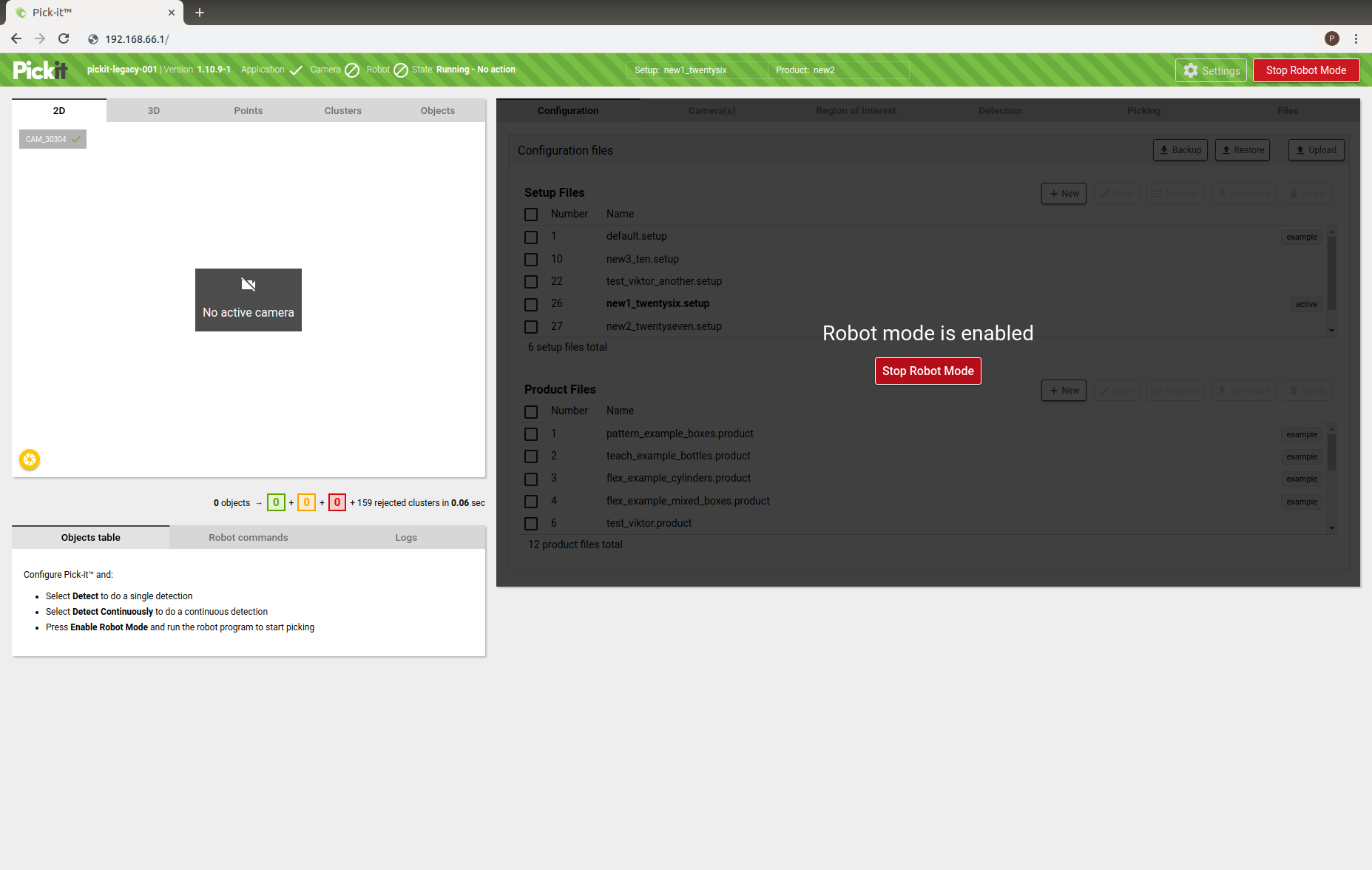
Top bar
Starting from left to right. First the logo of Pickit shown. Next to the logo the name of the system is given, typically this is pc-XXXXX. Next to the name the current software version of your system is shown.
Next are the Pickit connection status:
Robot: An active robot communication is indicated by ✓, otherwise ∅.
Cam: A camera connection is indicated by ✓, otherwise ∅.
App: The Pickit application correctly working is indicated by ✓, otherwise ∅.
Then the current operational mode is shown. The Pickit system has 4 main operational modes:
Running: Pickit is ready to receive commands from the robot and to send localization results to the robot. You can only run a robot program with Pickit when this state is activated.
Check: Pickit is doing a single object detection without sending the result to a connected robot. This allows testing the object detection without any robot or machine connected.
Testing: Pickit is continuously detecting objects without sending the result to a connected robot. This mode allows testing the object detection without any robot or machine connected.
Idle: No commands from the robot are accepted.
Note
By default, Pickit enables the Robot mode upon startup.
Next to the state the current Setup and Product file are shown. More information on these can be found in the Configuration article.
Then the Settings button is shown. Here the Network and user settings can be defined. More information about these settings can be found in the article Settings.
At last the Robot mode button is shown. Here you can change from Robot mode to Idle.
Note
Only when Pickit is in Idle mode parameters can be changed and saved.
Left side
Here the Pickit iewer and detection grid are shown. See the corresponding articles to have an in depth explanation.
Right side
Here the parameters of the Pickit system can be changed and saved. All settings and parameters are divided over several tabs. See article of each tab to have an extensive overview: