Software release 4.0
Pickit 4.0 is a major release that introduces multiple software and hardware improvements. On the software side, we bring dedicated support to the most common applications solved by Pickit, plus multiple enhancements to camera performance and usability. On the hardware side, Pickit 4.0 introduces a new processor lineup, and extends the supported cameras with our highest-accuracy models to date. Read on to learn more about the new features and improvements included in this release.
Application licenses
Pickit gives eyes to robots, enabling to automate a wide variety of manufacturing processes. Applications with similar characteristics share common requirements and are solved in a similar way. The most common applications solved by Pickit are directly supported through Application licenses, and tailor the features, experience and budget to each use case. Pickit 4.0 supports these main applications:
Application |
Description |
|
|---|---|---|
|
|
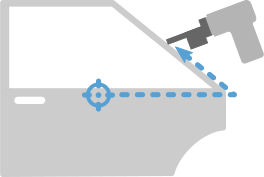
Part location Locate a single part to perform a vision-guided operation on it in a collision-free environment. |
|
|
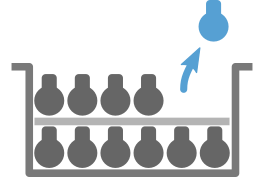
Semi-structured picking Pick parts laid out in stacks or layers. Parts show the same side to the camera with limited tilt. |
|
|
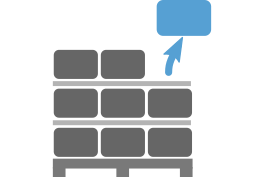
Depalletizing Pick parts like boxes, bags, buckets or totes layered on a pallet. |
|
|
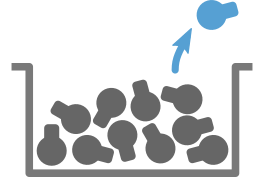
Random bin picking Pick randomly oriented parts from a bin or similar container. |
Of course, Pickit is a flexible system that can also solve applications not fitting exactly one of the above domains. To learn more on whether your application can be solved with Pickit, please get in touch with us at sales@pickit3d.com.
Cameras: New high-accuracy S-HD2 and XS-HD2 models
Pickit 4.0 introduces two new models to its lineup of high-definition certified cameras. These cameras, manufactured by Visionerf, use laser triangulation technology to deliver the highest accuracy in the Pickit portfolio:
XS-HD2-C100, ideal for guidance and inspection applications.
S-HD2-C300, ideal for small part bin picking or guidance and inspection applications.
XS-HD2-C100 |
S-HD2-C300 |
|
|---|---|---|
n/a |
up to 0.75 |
|
up to 0.1 |
up to 0.2 |
|
Detection distance [mm] |
150-185 |
410-580 |

Cameras: Software
All cameras
It is now possible to select the image size for all Pickit cameras, which allows to specify a trade-off between speed and quality. Smaller image sizes lead to faster capture and processing times, while larger image sizes provide more detail that can translate to more, or more reliable detections, as exemplified below.

Laser triangulation technology
Visionerf cameras have received a firmware update, which includes several improvements to the point cloud quality:
Noise reduction by a factor two.
Fewer missing points in challenging surfaces.
Optional blind spot reduction, where it is possible to include points visible by only one of the two camera sensors. The resulting image has more, but potentially less reliable points. This feature is especially useful in the presence of vertical protrusions and holes, as shown below.

New Pickit processor lineup
Pickit 4.0 introduces a new lineup of Pickit processors, offering different performance levels to suit a wider range of applications and budgets. The available processors are listed below:
Pickit processor |
Performance level |
Dedicated GPU |
# built-in Ethernet ports |
|---|---|---|---|
Essential (baseline) |
No |
3 + 4-port Pickit switch |
|
Standard (~30% faster) |
Yes |
6 |
|
High (~70% faster) |
Yes |
8 |

Notes:
Performance numbers are based on detection times for specific benchmarks and may vary depending on the application.
Dedicated GPUs can improve image capture and processing times, and are required by some detection engines.
Built-in Ethernet ports can be used for directly connecting multiple cameras and other components of a Pickit setup without requiring additional network switches.
Upgrades license
Access to software upgrades is managed through a new Pickit Upgrades license module. This module specifies the period and supported versions for upgrade. Apart from allowing access to recent features and improvements, the Pickit Upgrades license module addresses stability and compatibility needs typical of production environments:
Long-running applications requiring extended support periods, which can be renewed as required.
Adding or replacing a Pickit system in an existing production line, where access to specific versions is required for compatibility reasons, e.g. keep upgrades pinned to Pickit 4.x, even after 5.0 has been released.

Upgarding from Pickit 3.x
At Pickit, we strive to provide a transition between Pickit versions that is as smooth as possible. However, sometimes a manual user action is required. Pickit 4.0 introduces new processor hardware specifications, as well as a software platform prepared for long term software support. As such, upgrading from Pickit 3.x to Pickit 4.0 requires an intervention of Pickit application engineers. If you’re interested in upgrading to 4.0, please contact us at support@pickit3d.com.
Note
Pickit SD1 cameras are no longer supported in Pickit 4.0. Pickit 3.5 is the last version supporting them, and will continue to be maintained during the lifetime of Pickit 4.0 for major bug fixes.