Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (3.4) can be found here.
How to detect on a bin or pallet larger than the camera field of view?
High pallets, deep bins
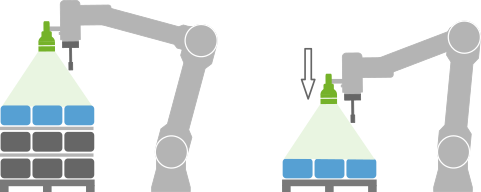
Objects can be at a height range that exceeds the recommended depth range for the application, according to the camera specifications. This can happen, for example, in deep bin picking and depalletizing applications. When it does, it is advised to mount the camera on the robot, and to move the detection pose down as the height of the parts decreases. The idea is to preserve a similar distance to the camera as the bin or pallet empties.
Wide bins and pallets
When a bin or pallet is wider than the camera field of view at the recommended depth range, it is advised to mount the camera on the robot, attach the ROI to the robot base, and cover the surface with multiple overlapping detection poses (example).
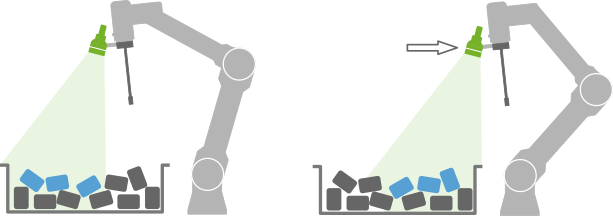
The overlap between the different detection poses should at least be as large as the longest dimension of the part to detect. This condition applies to the camera depth range where parts are expected to be visible, such as all the way up to the bin top in the below example.
