Warning
You are reading the documentation for an older Pickit release (2.2). Documentation for the latest release (4.0) can be found here.
Manually define the Pickit macros
Here we’ll explain how to define the Pickit macros manually without overwriting any existing macros.
Define macros
Booting the controller in normal mode, the macros can be defined manually. To do this go to SYSTEM → SETUP → MACRO INST..
Note
In order to use the example Pickit files, the macros should be defined in the exact same order as shown in the image below. Otherwise, the example files should be adapted with the correct macro ID’s before being run.
EXECUTE JOB |
SUSPEND JOB |
|
|---|---|---|
MACRO1 |
PI_CALIB |
******** |
MACRO2 |
PI_LOOK |
******** |
MACRO3 |
PI_WAIT |
******** |
MACRO4 |
PI_NEXT |
******** |
MACRO5 |
PI_CFG |
******** |
MACRO6 |
PI_SAVE |
******** |
MACRO7 |
PI_RUN |
******** |
MACRO8 |
PI_GPPD |
******** |
MACRO9 |
PI_CAPTU |
******** |
MACRO10 |
PI_PROCE |
******** |
MACRO11 |
PI_BUILD |
******** |
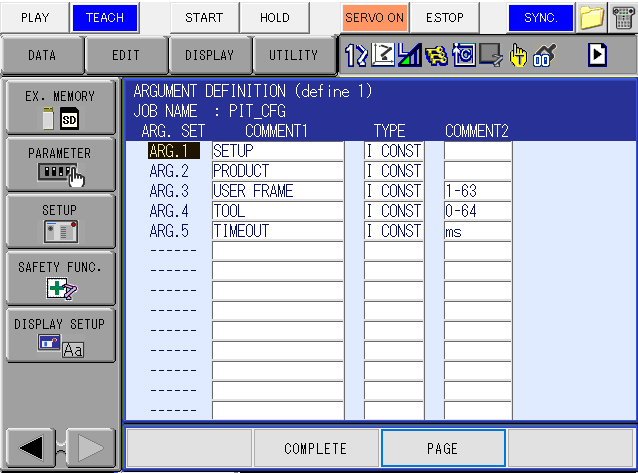
Macro argument definition
For macro PI_CALIB and PI_CFG, arguments need to be defined.
To do this select the MACROXX text and press SELECT.
Here set ARG. SET to USE and fill in COMMENT1, TYPE and COMMENT2. Press PAGE, select define 2, and fill in DISPLAY and EXPRES”N. The values that need to be filled in can be found in the table below.
Data |
ARG.no |
define 1 |
define 2 |
||||
COMMENT1 |
TYPE |
COMMENT2 |
COMMENT1 |
DISPLAY |
EXPRES’N |
||
PI_CALIB |
1 |
USER FRAME |
B CONST |
USER FRAME |
ON |
U/FRAME: |
|
PI_CFG |
1 |
SETUP |
I CONST |
SETUP |
ON |
SETUP: |
|
2 |
PRODUCT |
I CONST |
PRODUCT |
ON |
PRODUCT: |
||
3 |
USER FRAME |
I CONST |
1-63 |
USER FRAME |
ON |
U/FRAME: |
|
4 |
TOOL |
I CONST |
1-64 |
TOOL |
ON |
TOOL: |
|
5 |
TIMEOUT |
I CONST |
ms |
TIMEOUT |
ON |
TIMEOUT: |
|
If the arguments are set correctly, the screen will be similar as shown below. Now the Pickit macros are correctly defined, and you’re all set to continue with the Yaskawa integration.