Warning
You are reading the documentation for an older Pickit release (2.3). Documentation for the latest release (3.4) can be found here.
ABB example picking program
This example program requires that Pickit is installed and set up with your robot. For installation instructions, please refer to the ABB installation and setup article.
Example programs
By default no main() module is loaded. One of the Pickit example programs can be loaded from HOME > ABB_Pick-it > Pick-it > Application examples.
Note
These example programs only works with Pickit software version of 2.2 or greater. If you are using a software version prior 2.2, please contact us at support@pickit3d.com, and we will assist you in finding a solution.
Below the main() part of the example program Pickit_simple_pick_and_place is shown. More information about this example program can be found in Simple pick and place program.
Also a similar robot program to Complete pick and place program can be found in the Applications example folder.
MODULE Pickit_simple_pick_and_place
! User input variables
CONST num target_picks:=-1;
CONST num desired_setup:=2;
CONST num desired_product:=2;
CONST num max_retries:=5;
CONST num PrePick_Z_offset:=-100;
CONST num PostPick_Z_offset:=100;
! Fixed points that need to be taught
CONST robtarget Detect:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9e9,9e9,9e9,9e9,9e9,9e9]];
CONST robtarget AbovePickArea:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9e9,9e9,9e9,9e9,9e9,9e9]];
CONST robtarget DropOff:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9e9,9e9,9e9,9e9,9e9,9e9]];
! Variable points computed from Pickit detection results
VAR robtarget PickitPick:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9e9,9e9,9e9,9e9,9e9,9e9]];
VAR robtarget PrePick:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9e9,9e9,9e9,9e9,9e9,9e9]];
VAR robtarget PostPick:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9e9,9e9,9e9,9e9,9e9,9e9]];
PROC main()
IF NOT pickit_is_running() THEN
ErrLog 4800, "Pick-it NOT in Robot Mode", "Pick-it is not in Robot Mode.",
"In the Pick-it web interface, click on 'Enable Robot Mode',",
"and restart the program to start picking.", " ";
Stop;
ENDIF
before_start;
TPWrite "Setting setup and product configuration...";
pickit_configure(desired_setup,desired_product);
goto_detection;
TPWrite "Looking for new object(s)";
pickit_detection_with_retries(max_retries);
WaitUntil pickit_get_results();
WHILE TRUE DO
IF not pickit_object_found() THEN
! There are no pickable objects, bail out.
Break;
ENDIF
PickitPick:=pickit_get_pose();
PrePick := RelTool(PickitPick,0,0,PrePick_Z_offset);
PostPick := Offs(PickitPick,0,0,PostPick_Z_offset);
IF pickit_is_pose_reachable(PickitPick, tool0)
AND pickit_is_pose_reachable(PrePick,tool0)
AND pickit_is_pose_reachable(PostPick,tool0) THEN
! Object is pickable!
pick;
goto_detection;
pickit_detection_with_retries(max_retries);
place;
WaitUntil pickit_get_results();
ELSE
! Object is unreachable, get the next detection, if any.
pickit_next_object;
WaitUntil pickit_get_results();
ENDIF
after_end;
ENDWHILE
ENDPROC
PROC before_start()
! Move to home position
! Open gripper
ENDPROC
PROC goto_detection()
MoveJ Detect,v500,z0,tool0;
ENDPROC
PROC pick()
TPWrite "Moving to an object...";
MoveJ AbovePickArea,v500,z0,tool0;
MoveL PrePick,v500,z0,tool0;
MoveL PickitPick,v500,fine,tool0;
! Add object grasping logic here.
MoveL PostPick,v500,z0,tool0;
MoveJ AbovePickArea,v500,z0,tool0;
ENDPROC
PROC place()
MoveJ DropOff,v500,fine,tool0;
! Add object releasing logic here.
ENDPROC
PROC after_end()
IF NOT pickit_object_found() THEN
IF Pickit_roi_empty() THEN
TPWrite "The ROI is empty.";
ELSEIF Pickit_no_image_captured() THEN
TPWrite "Failed to capture a camera image.";
ELSEIF NOT(pickit_is_pose_reachable(PickitPick, tool0)
AND pickit_is_pose_reachable(PrePick,tool0)
AND pickit_is_pose_reachable(PostPick,tool0)) THEN
TPWrite "All detections are unreachable.";
ELSE
TPWrite "The ROI is not emptym but the requested object was not found.";
Pickit_save_snapshot;
ENDIF
ENDIF
ENDPROC
ENDMODULE
Define the tool for picking
Create a tool with the actual TCP values. In this example, tool0 is used.
Set correct constant values
At the top of the program, the following constants need to be filled in with the correct values:
Desired_setup: the desired Pickit setup id.
Desired_product: the desired Picket product id.
Max_retries: the maximum number of retries for Pickit.
PrePick_Z_offset: the z-offset for PrePick relative to the tool frame.

PostPick_Z_offset: the z-offset for PostPick relative to the robot base.

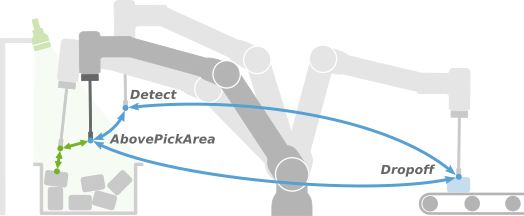
Define fixed points
In this example program, three fixed points are used. These points need to be defined depending on the application.
Detect: Where to perform object detection from.
AbovePickArea: A point roughly above the pick area from which the above two can be reached without collision.
DropOff: Where to place objects.
Add grasping/releasing logic
In before_start(), pick() and place() the correct grasping and release logic should be added.
Execute the picking program
Attention
Before running the robot program for the first time, make sure that:
There exists a valid robot-camera calibration.
The Tool Center Point (TCP) has been correctly specified.
The robot speed is set to a low value, so unexpected behavior can be identified early enough to prevent the robot from colliding with people or the environment.
Pickit is in robot mode, which is enabled in the Pickit web interface.
Now you can run the program. Happy picking!