Warning
You are reading the documentation for an older Pickit release (3.3). Documentation for the latest release (4.1) can be found here.
DeepAL
Pickit DeepAL is a detection engine specially designed for unmixed depalletization applications, where the parts to pick are mostly flat and stacked in layers in semi-structured patterns. Typical applications include the depalletization of boxes, totes and buckets.
DeepAL combines both depth and color information into a state-of-the art deep learning algorithm, which enables it to:
Teach parts fast. No training required, just show it to the camera and you’re ready to go!
Detect the correct orientation of a box based on its color pattern. DeepAL is quite tolerant to changing lighting conditions.
Detect plain boxes with no color pattern.
Detect parts in any pattern. Pickit doesn’t need to know about how the parts are laid out, and the pattern can change from one layer of the pallet to the next.
Detect parts that have moved (and even tilted), as can happen on pallet top layers.
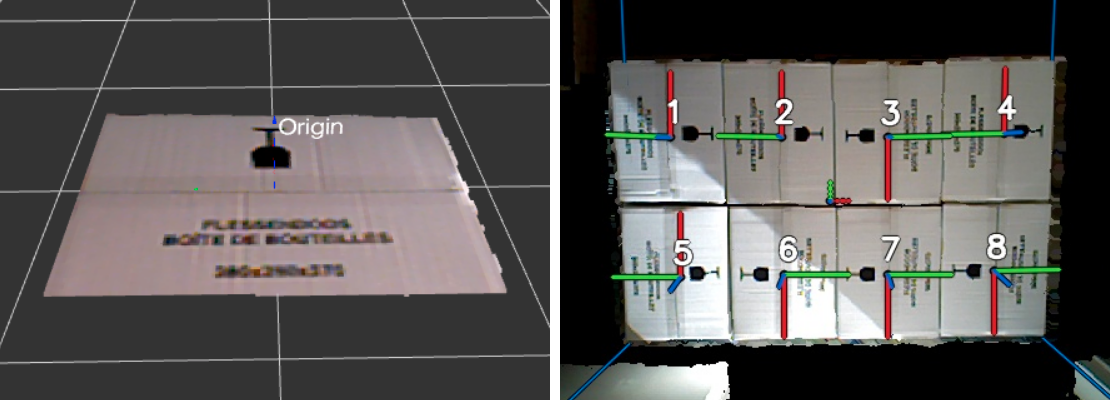
Objects are detected based on a previously taught model, so DeepAL works in two steps:
Teach a model: Show the object to detect to the camera. DeepAL will learn both its shape and color pattern (below left).
Detect the objects: Pickit will look for objects with similar shape and color pattern in the scene (below right).
Learn more about how to use the DeepAL engine in the article on explaining the DeepAL detection parameters.
Note
Pickit DeepAL is intended to be used in combination with the Pickit L camera.
To run Pickit DeepAL, special hardware is needed on the Pickit processor, as well as a license module. If you already have a Pickit system and would like to know if it’s compatible with the DeepAL engine, please contact sales@pickit3d.com.