Warning
You are reading the documentation for an older Pickit release (3.3). Documentation for the latest release (4.1) can be found here.
Software release 3.3
Pickit 3.3 introduces a significant improvement in application cycle time when using M-HD2 cameras, by reducing image capture time by up to 50%.
Non pick-and-place applications like surface treatment (sanding, deburring) and dispensing (gluing, sealing) require detecting a single part whose location is roughly known in advance, and performing an operation on it. To solve and deploy such applications more effectively, Pickit 3.3 introduces the expected object location filter, and provides ready-to-use robot programs for five popular robot brands.
Finally, a new engine for detecting circular holes is made available as an optional add-on.
Keep reading to learn more!
Image capture time
The image capture time for our HD cameras has been optimized. You can expect a reduction of up to 10% for the M-HD and L-HD cameras, and especially of up to 50% for the M-HD2!
Specifically, Pickit’s HD camera presets on the M-HD2 camera have capture times that are on average 40% lower (0.8 seconds) compared to version 3.2.
This has a direct impact on application cycle time, especially for robot-mounted cameras. Object detection consists of two steps, image capture and image processing. Whereas image processing can often be masked by performing robot motions in parallel, a robot-mounted camera must remain stationary during image capture. Thus, a reduction in image capture time translates directly into a reduction of your application cycle time.

Solving non pick-and-place applications more efficiently
Expected object location
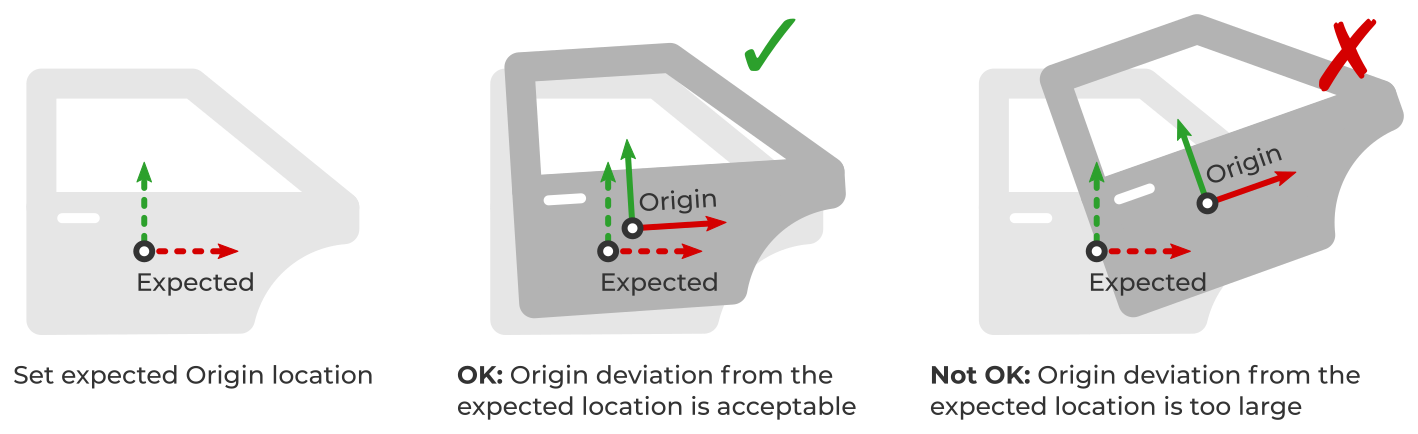
In applications like surface treatment or dispensing, the location of the part to process is roughly known in advance, and object detection is used to pinpoint its exact location. Pickit 3.3 introduces a new feature called expected object location, which rejects parts that deviate too much from an expected location.
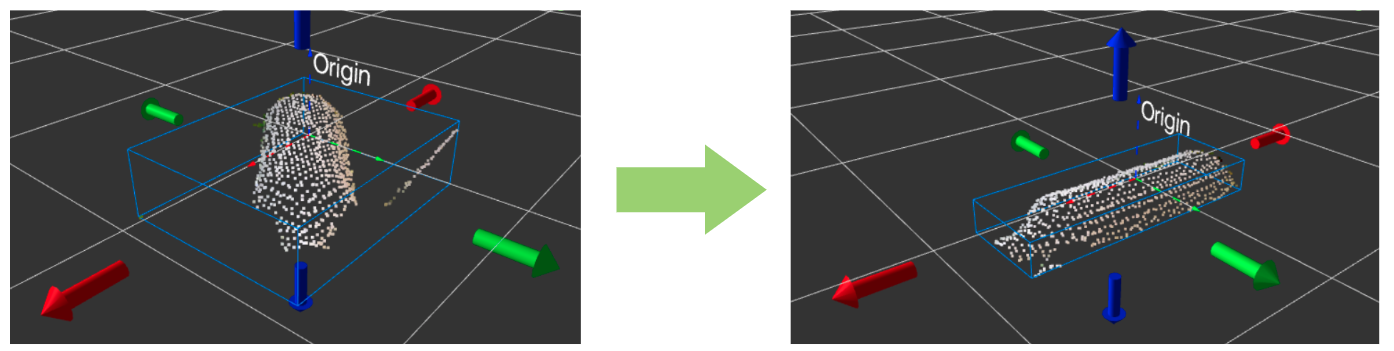
Edit the origin of Teach models
Pickit now allows editing the location of a Teach model’s origin. This is useful in the following situations:
Having an intuitive frame for specifying the expected object location.
Having an intuitive frame from which to specify pick point locations.
Setting a meaningful model crop box orientation, especially when teaching from camera.
Robot programs for non pick-and-place applications
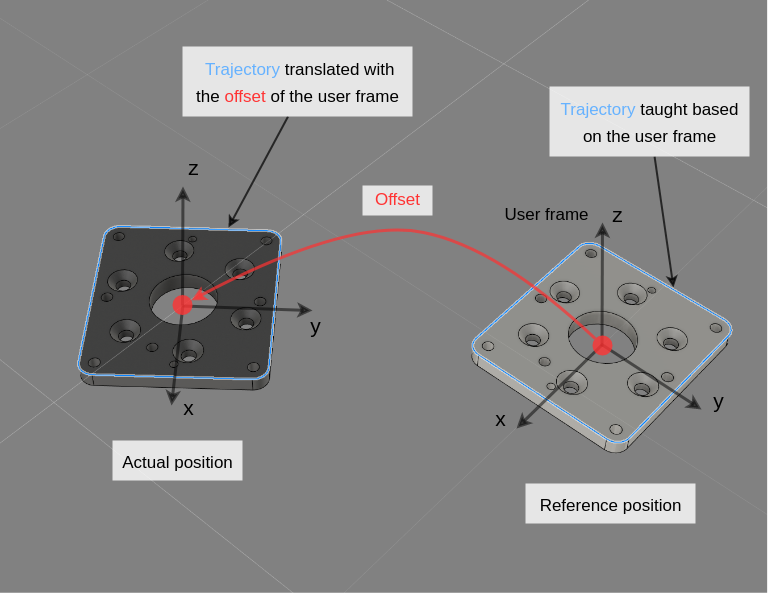
Robot programs that perform surface treatment or dispensing operations on a part whose location can change typically use the notion of a user frame. First, robot trajectories for executing the operation are defined with respect to a user frame, which is attached to the part. Then, Pickit is used to pinpoint the part location and update the user frame. This way, robot trajectories are executed relative to the current part location.
The structure of such a robot program is different from that of a pick-and-place application, and Pickit 3.3 provides ready-to-use programs for the following robot brands:
As usual, there is also a robot-independent article that explains the logic in a way that can be easily ported to other robot brands.
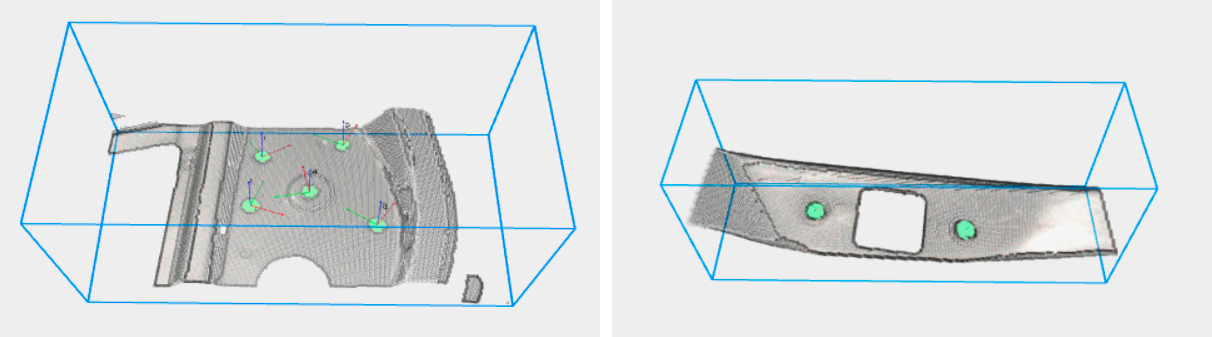
New engine: Hole detection
This is the latest addition to the family of Pickit detection engines. Pickit’s hole detection engine can reliably detect circular holes of known size on a surface. With an HD camera, it can detect holes as small as 6mm in diameter, which makes it a good choice for screwing and assembly applications.
This detection engine is an optional add-on that can be added on top of any Pickit 3.3 system. Please get in touch with the Pickit sales team to learn more.
Get the update now
This upgrade requires your Pickit version to be 3.2.3. If you have an older version, please upgrade first to 3.2.3 before moving to 3.3. If you are interested in upgrading and trying out Pickit 3.3, check out how you can upgrade your system.