Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
Software release 3.0
Pickit 3.0 brings two significant improvements on the hardware side: A new compact and performant processor, and the billet picker, a gripper especially made for picking axisymmetric parts.
On the software side, Pickit offers a licensing system that allows you to get what you need, without having to pay extra for features you won’t be using. We’re also introducing improvements that facilitate the experience of setting up your application, as well as the performance and robustness you need for running it in production.
Read on to learn more!
New Pickit processor
The Pickit processor 3.0 is 75% lighter and more compact compared to the Pickit processors 2.0: Its dimensions are almost half as large and it fits in a 1U rack mount, instead of 2U. The processor is also more rugged and less noisy.
Additionally, its 12V DC-in power supply is a separate adapter, so the processor can be optionally mounted on an Autonomous Ground Vehicle (AGV), and does not require to be powered from an AC power input like a wall socket.
Note
Pickit 3.0 is compatible with existing 2.0 processors, so you can upgrade your 2.x software to 3.0.

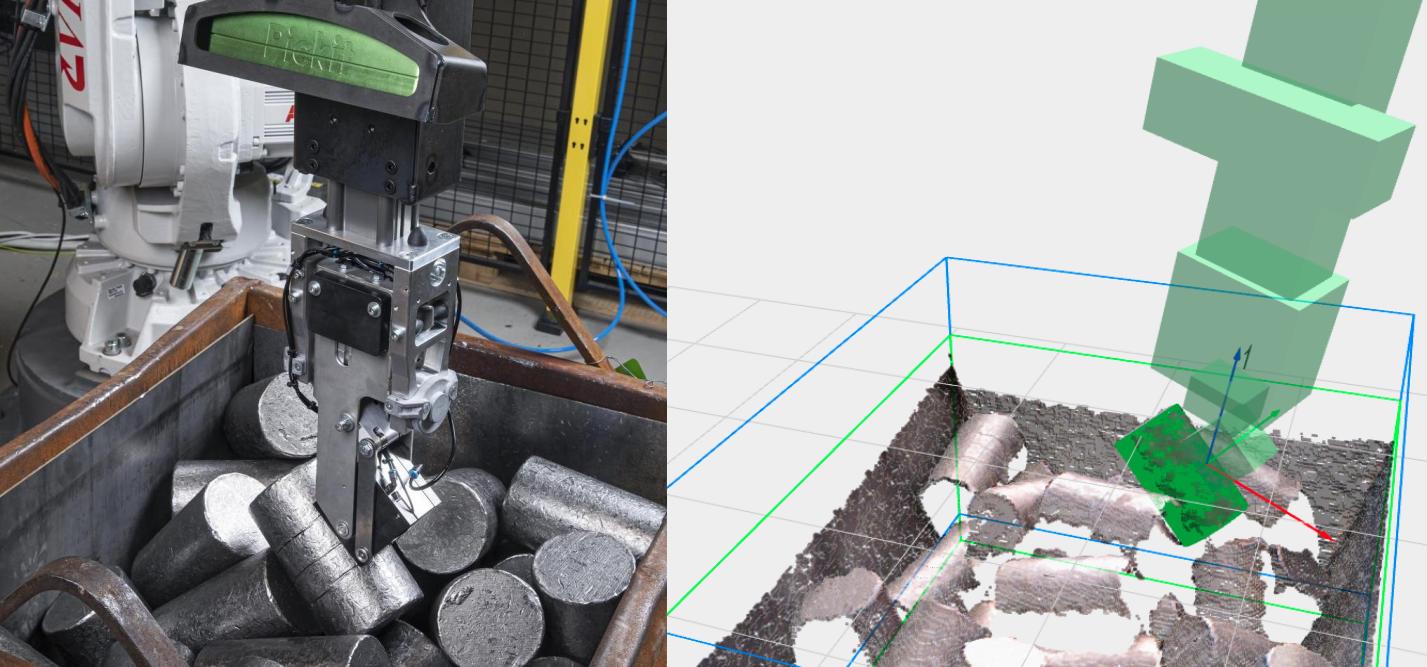
Billet picker
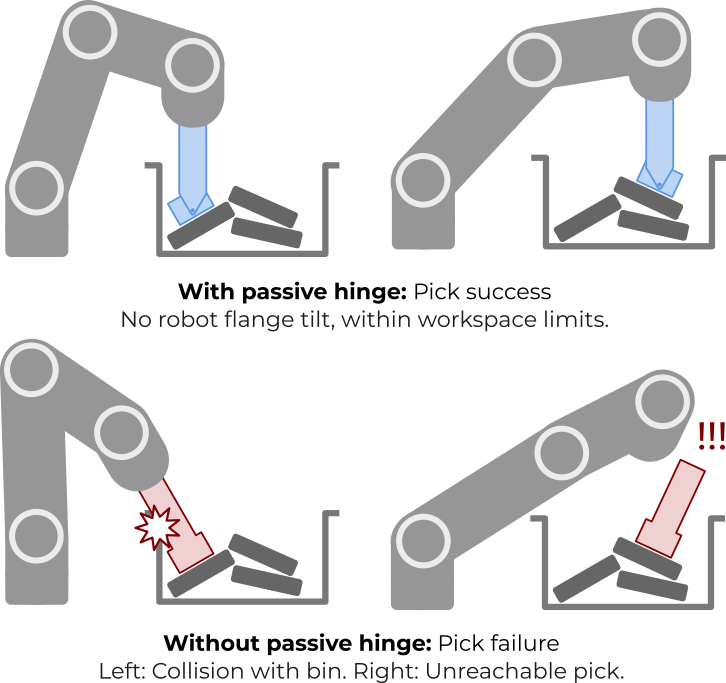
The billet picker (patent pending) is a gripper solution with a passive hinge that seamlessly integrates into the product. It has been especially designed for picking randomly oriented metal billets from deep bins. It can also be used for picking other axisymmetric parts like pipes and shafts.
Learn more about the gripper and its advantages in this article.

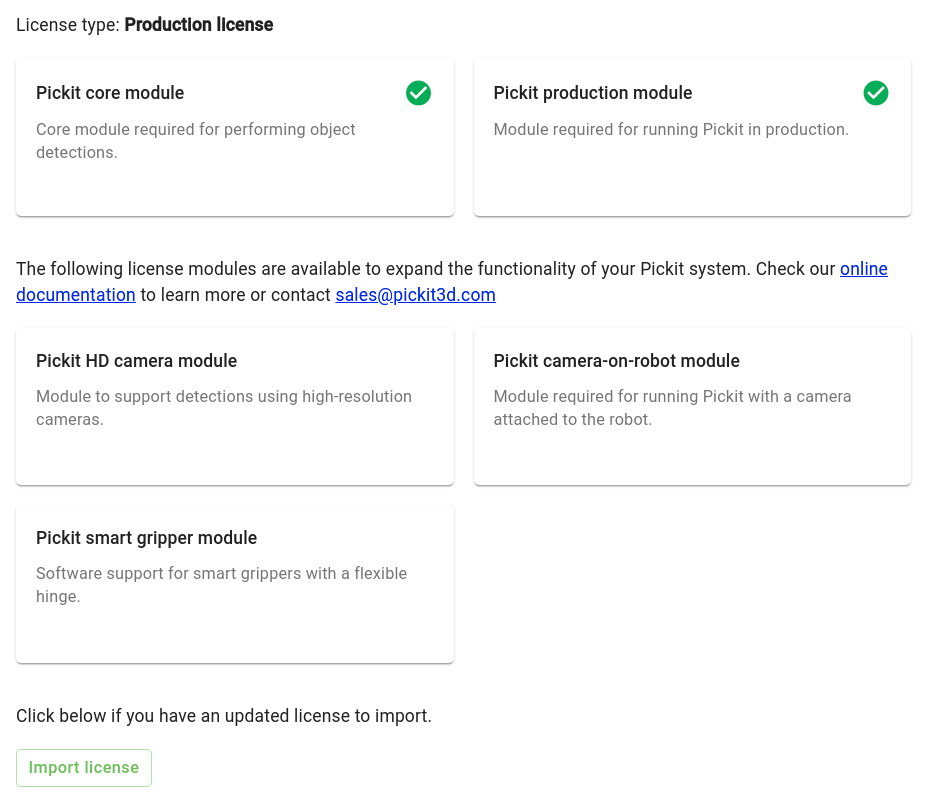
Licenses
The Pickit license system allows you to tailor the Pickit experience to your needs. You can opt in to optional features like an HD camera or the billet picker. Or, you can opt-out of production-specific features if you’re an educational or non-profit organization.
Tip
Upgrading from Pickit version 2.x? Follow these instructions to get your Pickit license.
Software improvements
Pickit Teach
CAD model loading times are now faster. If you frequently change the Pickit configuration during your application, this optimization can benefit your average cycle time.
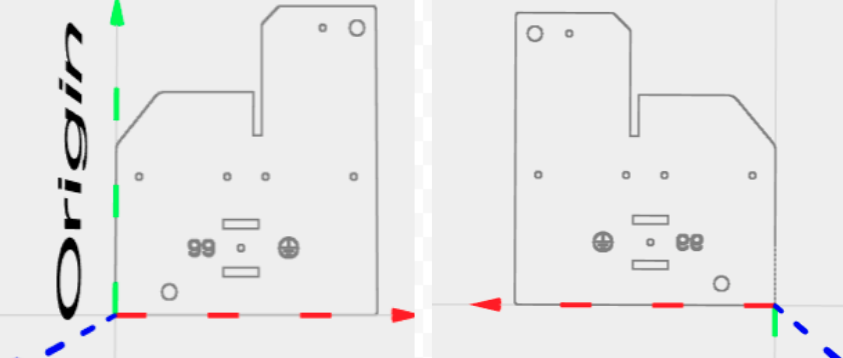
In version 3.0, you can now teach 2D models from dxf CAD files.
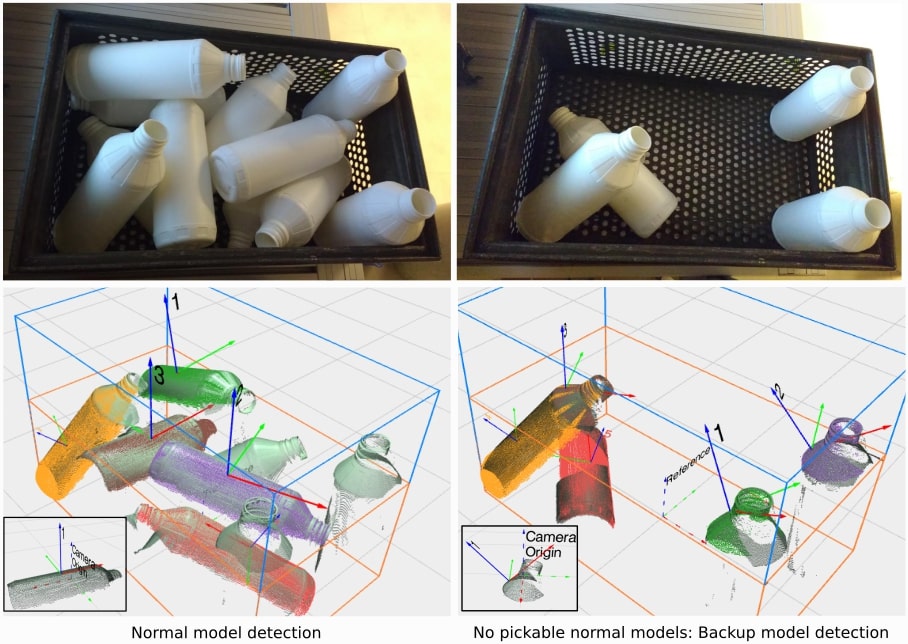
We also introduced the notion of backup models, which are only searched for if no normal model is pickable.
Improved empty ROI detection
Until Pickit 2.4, an empty ROI was detected based on the number of ROI points. In version 3.0, this method is replaced by an occupied volume approach. This makes the empty ROI detection more reliable.
Picking
The billet picker is fully integrated into the Pickit software, such that Pickit can smartly use the gripper’s passive hinge to avoid collisions, reduce the required robot workspace, and increase the likelihood of successful picks.
Calibration verification and calibration from robot
A robot-camera calibration can become outdated if the camera moved relative to the robot since the last successful calibration. Since a correct calibration is key for accurate picking, Pickit 3.0 introduces the possibility to verify calibration results.
For applications where robustness is paramount, it might be relevant to perform calibration validation before every production run, or at regular time intervals. When validation results are not good enough, a recalibration is required.
To automate this process, you can now perform robot-camera calibration from the robot program, without any human intervention. The same goes to the newly introduced calibration validation.
Reachability checks in robot integrations
Most robot integrations now have functions for performing reachability checks, so you can test if a pose, like a pick point, is reachable by the robot. Reachability checks should be performed when receiving an object from Pickit, and the robot program should not attempt to pick unreachable objects.
Supported integrations are ABB, Fanuc, Kuka, Universal Robots and Yaskawa.
Upgrading from version 2.4
At Pickit, we strive to provide a transition between Pickit versions that is as smooth as possible. However, sometimes a manual user action is required. The following list outlines the few situations where this is the case. If any of them applies to your application, make sure to take them into account:
Users collecting calibration poses using a robot program, as opposed to using the web interface, should upgrade to the latest version of their robot integration, found in the downloads page. Otherwise the calibration program will not run correctly.
Existing setup files using empty ROI detection need to be adapted by reteaching the empty ROI volume threshold.
Get the update now
If you have an older Pickit version and would like to try 3.0, check out how you can upgrade your system.