Warning
You are reading the documentation for an older Pickit release (3.4). Documentation for the latest release (4.1) can be found here.
Software release 3.4
We are proud to release a complete lineup of second-generation cameras in Pickit 3.4, both standard-definition and high-definition, with superior performance and reliability.
On the software side, we’re rolling out a number of usability improvements in terms of password protection and application monitoring, plus enhancements to existing features.
Keep reading to learn more!
Second-generation camera lineup

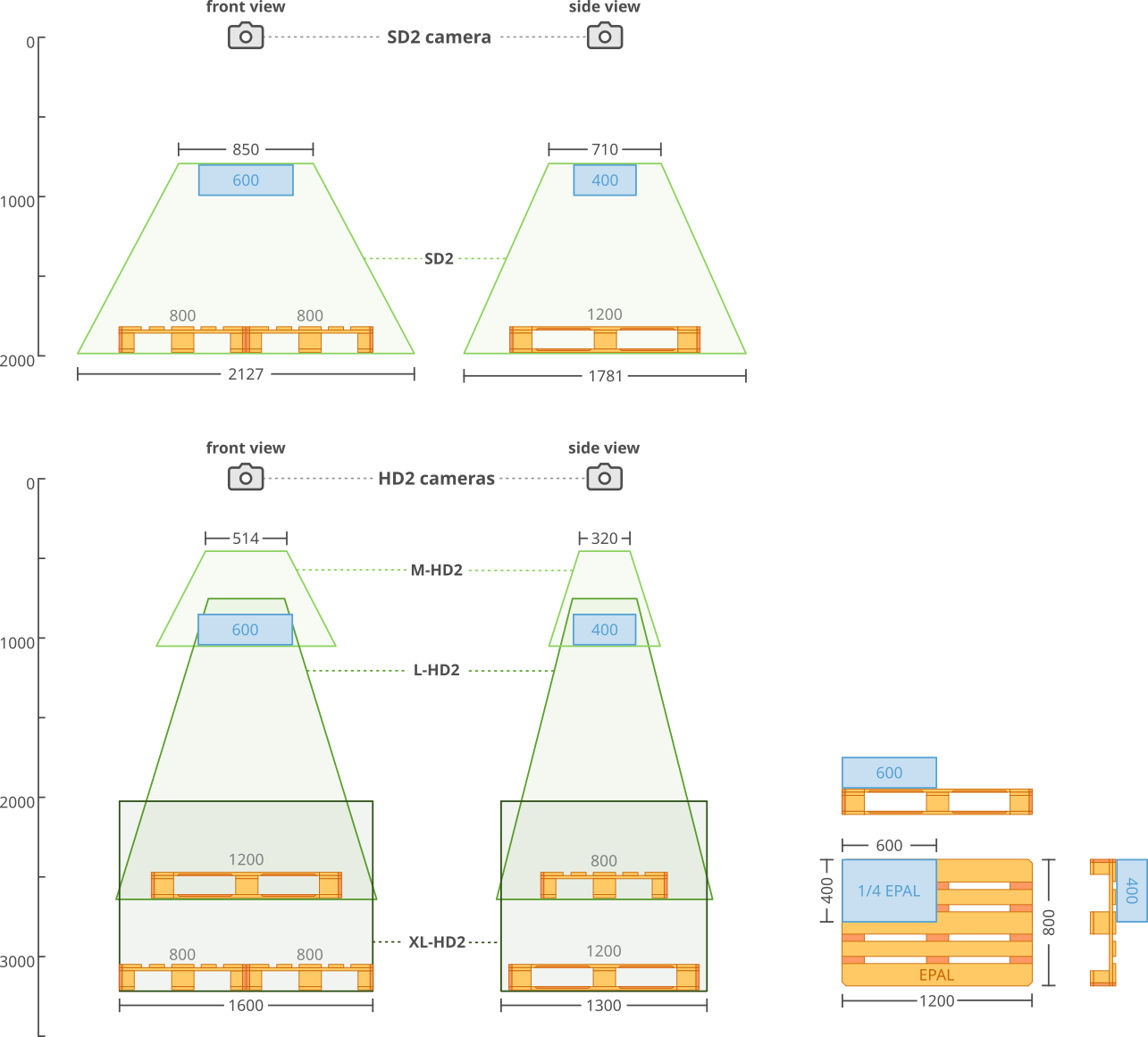
Pickit 3.4 introduces the complete lineup of its second-generation of certified cameras. The updated camera portfolio covers more applications, and brings improvements in both performance and reliability. All cameras converge to using Ethernet as communication technology, and both standard and high-definition camera lineups cover fields of view spanning from small boxes all the way up to two Euro Pallets (EPAL). Some highlights of each new camera:
The SD2 is the new standard-definition camera, which outperforms its first-generation counterparts across the board:
SD
SD2
Communication technology
USB
Ethernet
3D accuracy
4-18 mm
4-10 mm
IP rating
IP54
IP65
Operating temperature
5°C to 40°C
-10°C to 50°C
The L-HD2 camera complements the M-HD2 that was released with Pickit 3.2, and is built on the same hardware platform. It is a compact and versatile high-definition camera with a larger field of view, which can be mounted on robot or to a fixed structure.
The XL-HD2 is a fixed-mount camera based on laser triangulation technology. It has a large field of view that can fit two EPALs over its full range of depth.
SD2 |
M-HD2 |
L-HD2 |
XL-HD2 |
|
|---|---|---|---|---|
Recommended applications (learn more) |
||||
Bin picking |
✓ |
✓ |
✓ |
✓ |
Depalletization |
✓ |
✓ |
✓ |
|
Part localization* |
✓ |
✓ |
✓ |
|
Performance |
||||
3D accuracy [mm] |
4-10 |
1-2 |
2-6 |
2-4 |
Camera mount |
||||
Fixed |
✓ |
✓ |
✓ |
✓ |
On-robot |
✓ |
✓ |
✓ |
|
* For operations like sanding, gluing, sealing, welding, etc.
Below is an overview of the fields of view of each camera. You can explore them in more detail in the datasheet of each camera, or using our new interactive camera selector.
Note
First-generation cameras will continue to be supported for existing clients.
Web interface
Password-protection
This new, opt-in feature allows restricting who can modify the Pickit configuration from the web interface. When enabled, two user types exist: admin and operator. Admin is password-protected and has full privileges to configure the application and the Pickit platform. On the other hand, Operator can only monitor the application and collect data for troubleshooting and support.
Role |
Admin |
Operator |
|---|---|---|
Enable/disable robot mode |
✓ |
✓ |
Load/save snapshots |
✓ |
✓ |
Load setup and product |
✓ |
✓ |
Edit/save setup and product |
✓ |
✗ |
Display settings: Language and units |
✓ |
✓ |
Support settings: Download logs and backups |
✓ |
✓ |
Admin settings: Licenses, network, upgrades, … |
✓ |
✗ |
When password protection is enabled, the active user type is shown in the top bar.
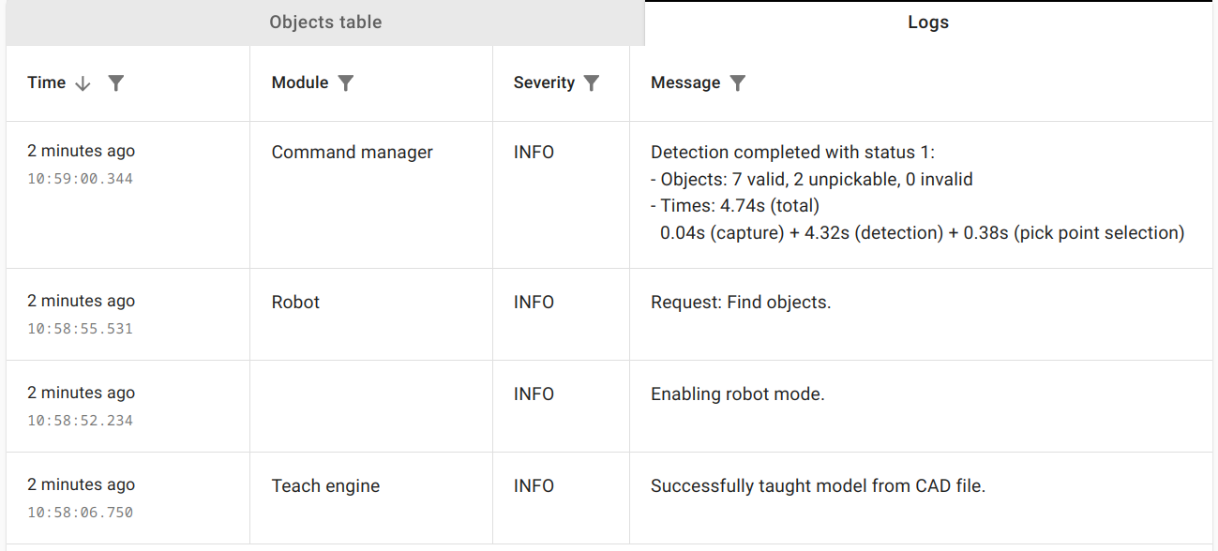
User logs
The user logs are a record of user-relevant events populated interactively as Pickit runs. Looking back at the history of log records can be a great resource to gain insights about the application, especially when troubleshooting an issue.
Pickit 3.4 improves the logging experience in two significant ways. Firstly, the web interface’s Logs tab has been revamped to display information of the current Pickit session with more clarity and detail. You can inspect the full history to get the broad context of a situation, or you can also focus your attention on specific messages by filtering by timestamp, module, severity, and message text.
Secondly, the system settings now offers the possibility to download the user logs from the last 30 days as an archive, or the active user logs in CSV format, which is convenient for importing in spreadsheet-like applications.
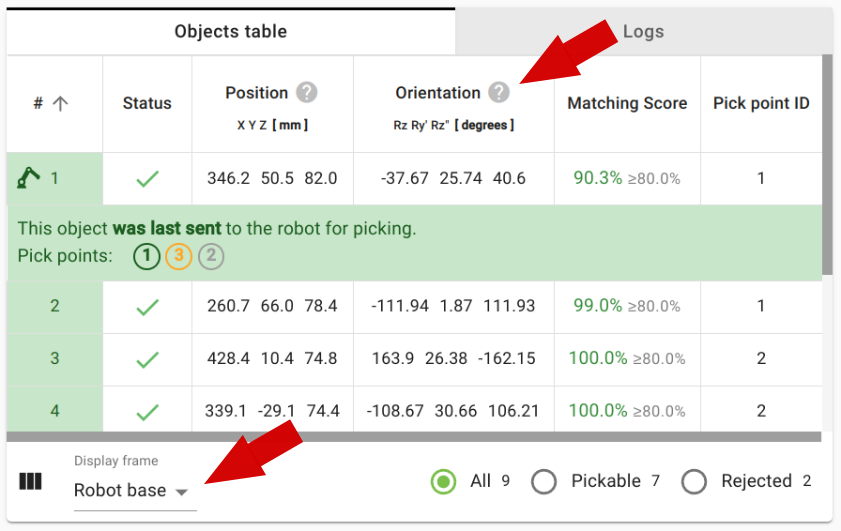
Objects table
The objects table reports numeric detection results. To make it more insightful, Pickit 3.4 now displays the object orientation and allows selecting the display frame for position and orientation, which can be the robot base, the ROI, or the expected object location (if enabled).
Furthermore, the Units settings have been extended such that you can:
Select the orientation representation to use for display across the Pickit web interface so it can, for instance, match that of your robot.
Set the precision with which to display length results like position and dimensions.
Updated features
Expected object location
Pickit 3.3 introduced the possibility to reject parts that deviate too much from an expected location. In version 3.4 we have extended the expected object location feature to allow a more fine-grained specification in both position and orientation. For example, in the de-racking application shown below we expect car doors to not deviate too much from an expected position in the X and Y directions, but we want to leave the Z (rack) direction unconstrained. For orientation, it’s sufficient to specify a single global deviation.
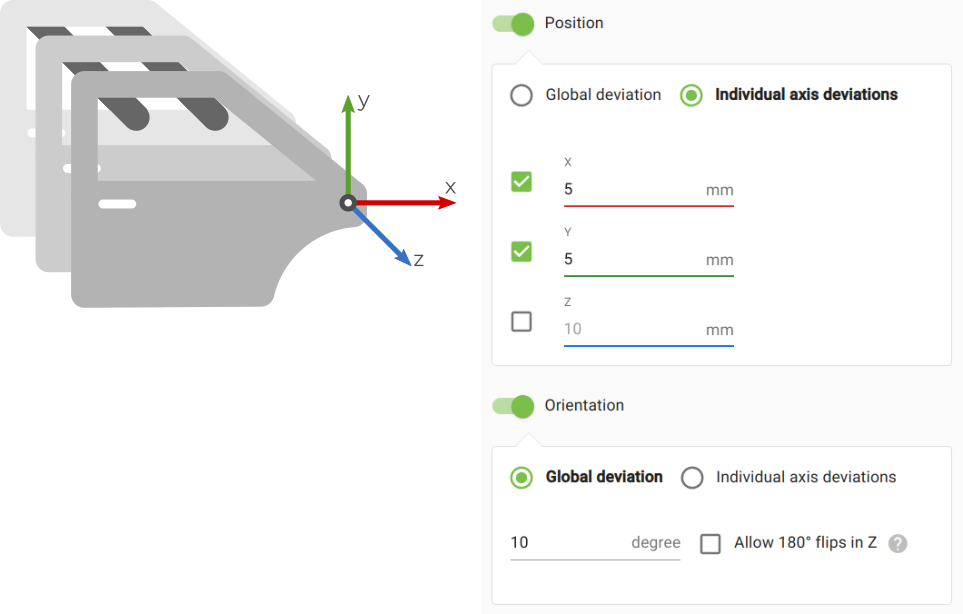
Furthermore, in such applications it can be useful to communicate to the robot the relative offset from the expected location instead of an absolute location with respect to the robot base. Pickit 3.4 allows setting this in the new object reference frame option.
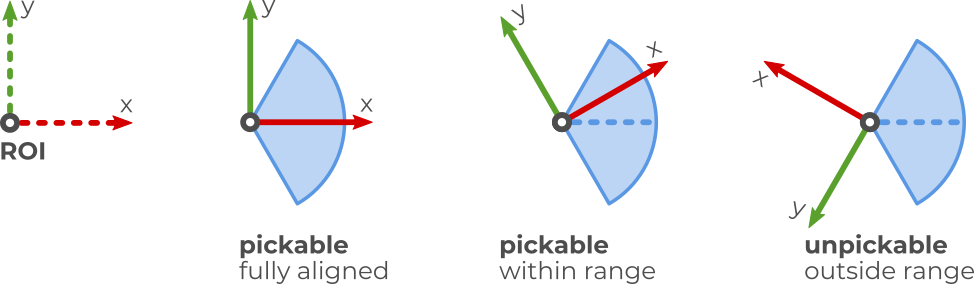
Desired pick orientation
Pick points can have flexibility in how they are oriented. This flexibility can be used to favor pick orientations that are easier and faster to reach by the robot, resulting in for instance, reduced wrist motions, or avoiding wrist configurations causing undesired tension to robot tool cables.
The preferred pick orientation feature allowed to specify this as a preference. In Pickit 3.4, we have renamed the feature to desired pick orientation, because it is now possible to enforce it as a constraint, and mark objects as unpickable when not satisfied.

Robot integrations
Recent hardware and software improvements have enabled Pickit to solve sub-millimeter part localization applications. To this end, robot integrations require communicating results with higher resolution, which is now supported by integration versions updated for Pickit 3.4. They are available in the downloads page.
Pickit 3.4 remains backward compatible with older robot integrations.
HD camera settings
In Pickit 3.4, we’re making camera presets the default mechanism for configuring the camera settings. The option for initializing camera settings from an image capture is still present, but needs to be enabled from the advanced settings. The motivation behind this change is that users sometimes need to manually fine-tune the capture settings after initializing from an image capture, and manual camera settings are an advanced Pickit feature.
Get the update now
This upgrade is incremental, and requires Pickit to be at version 3.3. If you have an older version, please upgrade first to 3.3 before moving to 3.4. If you are interested in upgrading and trying out Pickit 3.4, check out how you can upgrade your system.