Warning
You are reading the documentation for an older Pickit release (2.3). Documentation for the latest release (4.1) can be found here.
Software release 2.3
The new features of the 2.3 release revolve around improving flat object detection and robot tool definition.
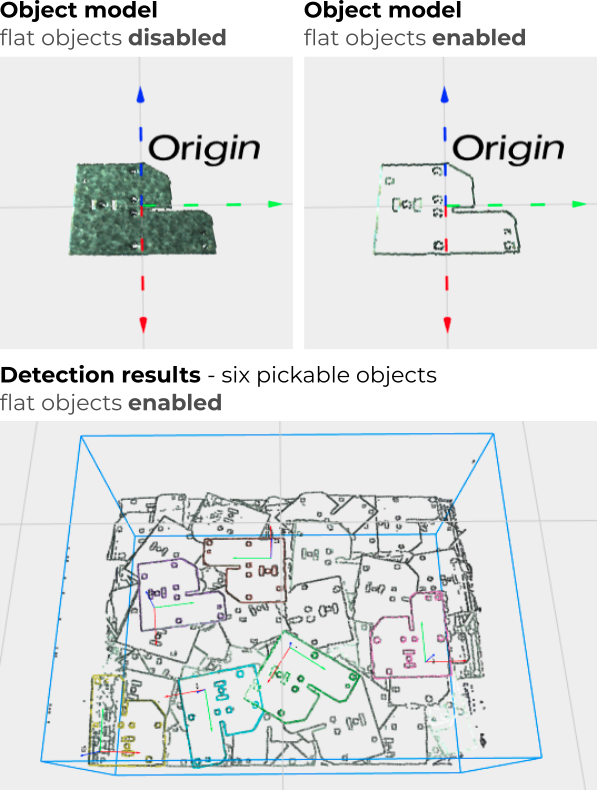
1. Flat object detection
Pickit Teach is great for detecting objects with a distinctive 3D shape. Flat objects are different from other 3D shapes in the sense that edges are the main source of shape information.
This release enables Pickit Teach to detect flat objects more reliably by focusing on shape edges.
2. Define your tool model from a CAD file
In the previous 2.2 release, we added support for teaching part models from CAD. In this release, we extend this so you can also define your tool model from a CAD file.
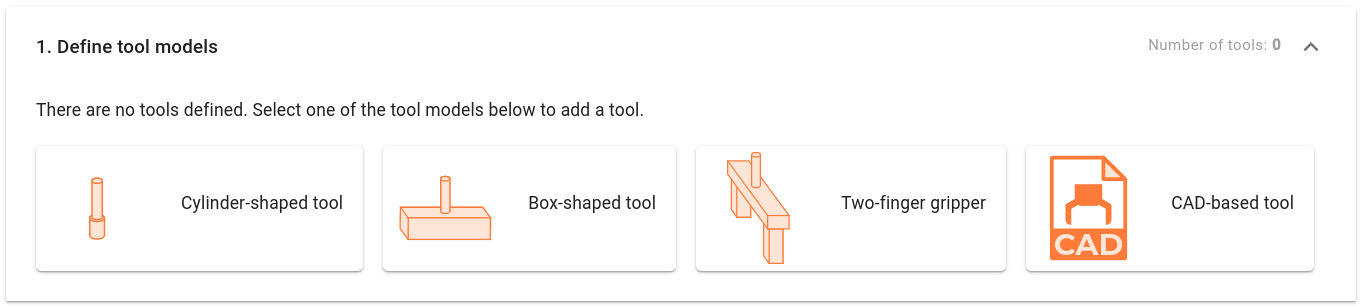
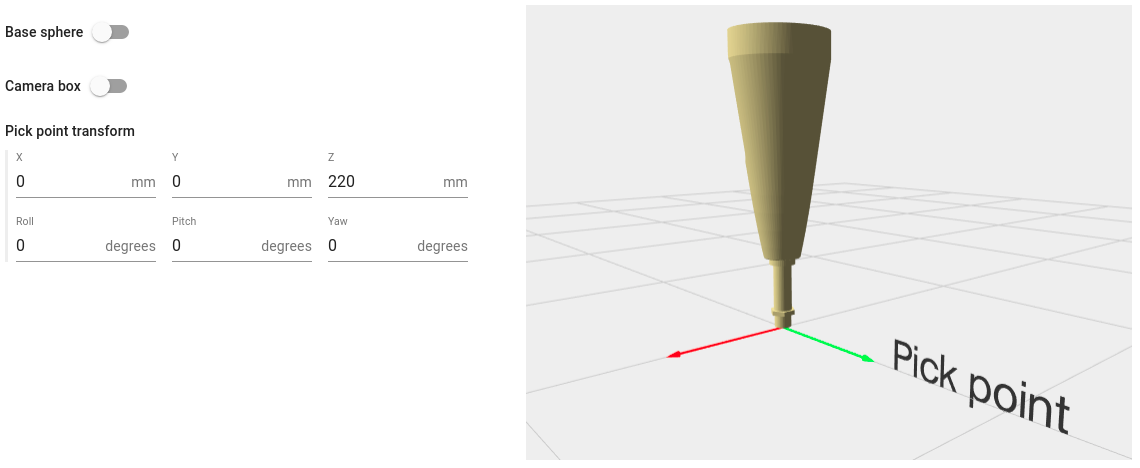
Alternatively, if a CAD file for your tool is not readily available, you can still define your tool using the existing generic tool models.
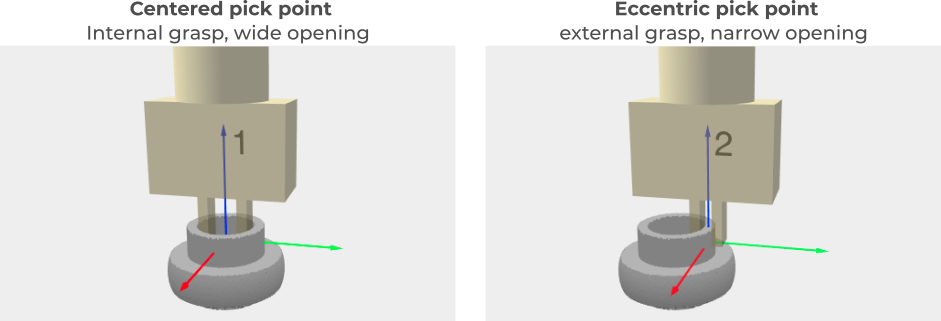
3. Assign different tools to different pick points
It’s now possible to create multiple tool models and assign different tools to different pick points. A common example would be a two-finger gripper used with different opening distances depending on the selected pick point.
Get the update now
If you have an older Pickit version and would like to try 2.3, check out how you can upgrade your system.