Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
Detecting an empty ROI box
Motivation
In some applications, it’s relevant to identify when the Region of Interest (ROI) is empty and take appropriate action. For example, triggering the refill of an empty bin or buffer table, or instructing the robot to move one layer down in a depalletizing application.
Consider the case where we’re interested in picking boxes from a bin, as shown below:
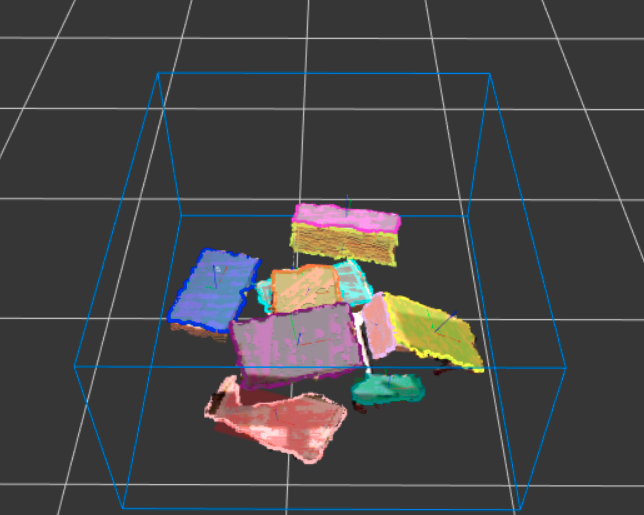
Initially, there are many pickable boxes, and the robot proceeds to pick them one by one. At some point there will be no more boxes to pick. There are two scenarios that can lead to this state, which Pickit can differentiate:
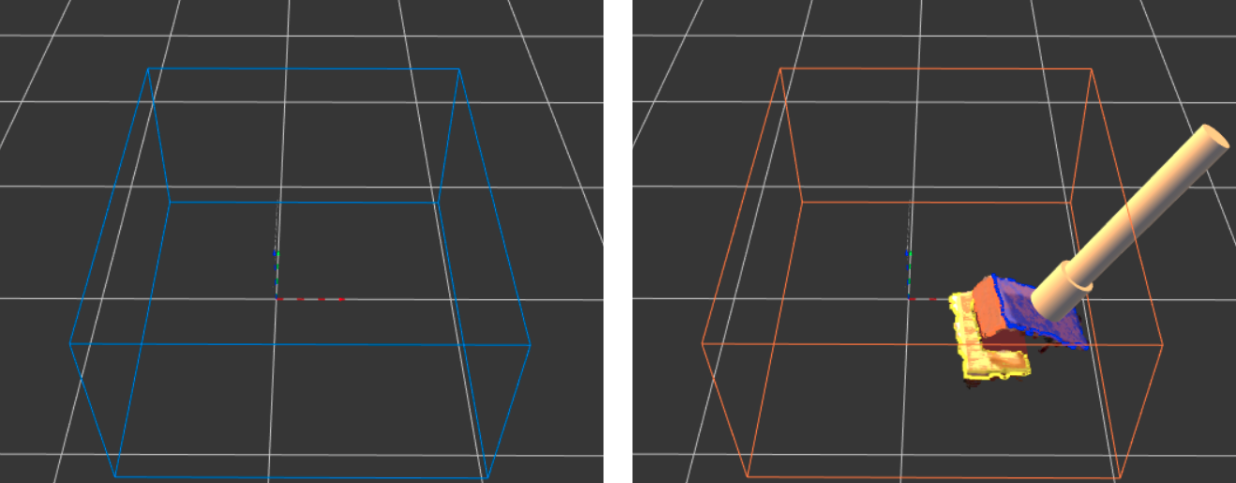
The ROI is empty, all boxes have been picked and nothing remains in the ROI (below left).
The ROI is not empty, yet there are no pickable objects. This can happen when Pickit detects objects but:
Objects are not pickable, for instance due to a collision between the robot tool and the bin at the pick pose (below right, top blue box).
Objects are detected, but not reliably enough, for instance due to not being visible enough and having a too low matching score (below right, bottom yellow box).
Defining an empty ROI
The ROI box is considered to be empty when the volume it contains is less than a specified threshold. This threshold is set in the Setup page, under Define empty ROI box.

The threshold can be manually set, or can be taught by pointing the camera to an empty ROI (where all objects have been removed) and pressing Teach from scene. This will perform a camera capture and set the empty ROI threshold based on the volume contained in the ROI. The value should probably be low, but not necessarily zero. For example, plastic bags covering the inner walls of a bin are hard to fully filter out of the ROI.
Note
The value taught with Teach from scene is a lower bound and can be manually increased, if desired. It should however not exceed the volume corresponding to a single object that is placed inside the box. Otherwise the object will not be detected.
Confirming an empty ROI
The Pickit web interface indicates in the detection summary when the ROI is considered to be empty.

When object detection results in no matches, the robot program can confirm whether it was due to an empty ROI and take appropriate action. Refer to the documentation of the Pickit robot integrations to learn the exact function to be called for your robot brand (example), and to this example application.
Recovery behaviors
When the ROI is not empty, yet no objects are detected, there are a number of behaviors that a robot can implement to make the remaining objects detectable. The following are a few examples:
If the camera is robot-mounted, the robot can run detections from different viewpoints that might have better visibility of the remaining parts.
Shuffle the ROI contents to make unreachable or occluded objects pickable. For instance, switch to blob detection to identify where ROI contents are, and instead of picking them, attempt to knock them down or move them around.
Signal an alarm and request human intervention.