Warning
You are reading the documentation for an older Pickit release (3.3). Documentation for the latest release (4.1) can be found here.
Pick points in Pickit Flex and Pattern
2D shapes
For 2D shapes (circles, squares, rectangles and ellipses), the pick point is located in the shape center, with the Z-axis perpendicular to the surface. Additionally, the following considerations apply:
Circle: The pick point has a symmetry axis about the circle center.
Square: The X-axis points toward one of the sides.
Rectangle and ellipse: The X-axis is parallel to the longest side (any of the two directions).

3D shapes
For 3D shapes (cylinders and spheres), the pick point can be in one of the following locations, which can be selected from the wizard in the Define pick points section.
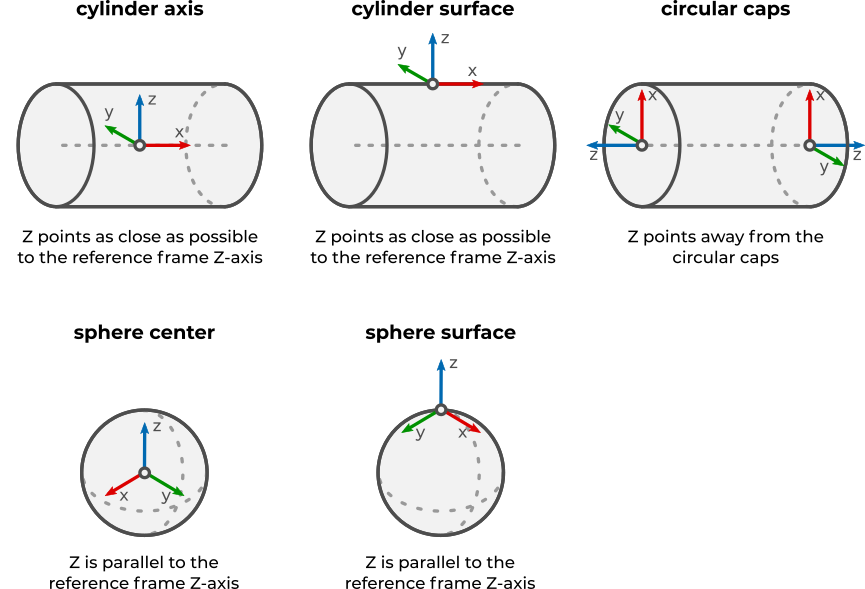
For cylinders, it’s possible to have pick points at two locations, like caps and surface, or caps and axis. When this is the case, the robot might want to use different drop-off strategies. The pick point ID can be used to discriminate which pick point was selected: IDs 1 and 2 correspond to the cylinder surface or axis, while IDs 3 and 4 correspond to the circular caps.
Blobs
Blobs have the pick point in the centroid of the visible points. Its orientation is such that the Z-axis points towards the visible points and the X-axis points along the longest blob direction.