Warning
You are reading the documentation for an older Pickit release (1.10). Documentation for the latest release (4.1) can be found here.
Attaching the Region of Interest to the world
Now that you know how to define and modify a ROI box, you need to decide where it is attached to. The ROI box can be attached to either the camera or the robot base. This distinction is meaningful for robot-mounted camera scenarios:
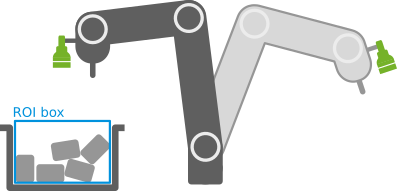
Camera
roi-attached-to-camera.gif A ROI box attached to the camera moves relative to the robot base as the robot end-effector (and camera) move.To define the ROI box, a running connection between Pickit and the robot is not required.
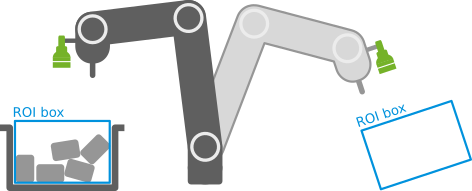
Robot base
A ROI box attached to the robot base remains stationary relative
to the robot base as the robot end-effector (and camera) move.
This is the recommended attachment for camera-on-robot scenarios. To
define the ROI box, a running connection between Pickit and the robot
is required.
Refer to the Attach the ROI Box to the robot base for picking objects from a big bin article for an example application.