Warning
You are reading the documentation for an older Pickit release (1.10). Documentation for the latest release (4.1) can be found here.
Picking
Pickit comes with a set of options that allows configuring how detected objects should be picked by a robot. These options, that can be found in the Picking tab of the Pickit web interface.
This article explains how to use all settings to get the most out of your application. You will learn how to align object frames for picking, prevent collisions with a bin or other objects and choose the pick order.
Note on frames
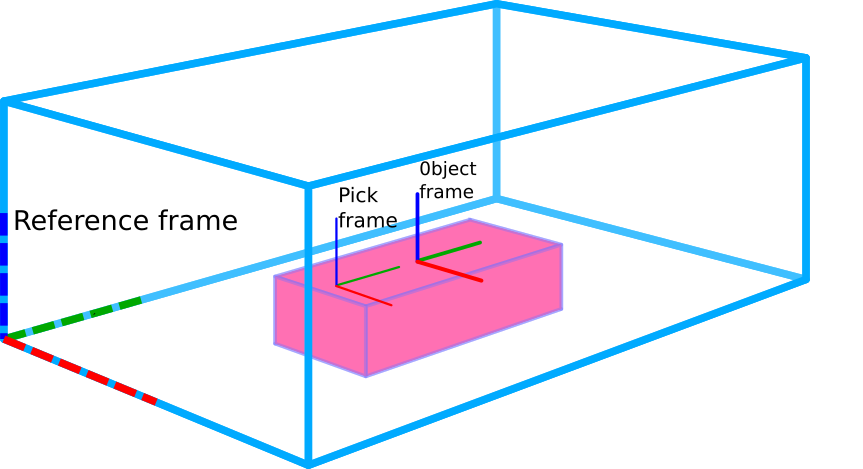
Before we start, let’s first define three frame types in Pickit that we’ll need throughout the article.
Reference frame: The reference frame defines the location of your work space in which to find objects. It usually has a Z axis (blue) that points up.
The object frame is the default frame that Pickit associates to a shape. It indicates where a detected object is located and how it is oriented. It is chosen by the Pickit detection algorithms and cannot be modified. This frame might not always be the best choice to use for picking, which is why the pick frame exists.
The pick frame is what gets sent to the robot. It defines how a robot can pick or grasp a detected object and is derived from the object frame by changing settings in the Picking tab of the web interface.
Object ordering
Under object ordering, the order in which objects will be picked when more than one object is detected is defined. See following article to have more detailed information about the different options.
Pick strategy
Under Pick strategy, it is defined if and how the pick frames should be aligned. This is often used to optimize cycle time or to prevent bin collision. Following settings can be applied:
Collision prevention
This section explains how to prevent collisions when picking objects with a robot. Objects that will not be picked because of collision constraints will be labeled as unpickable and not sent to the robot. In the Pickit web interface, unpickable objects are displayed orange in the Objects view and the Detection grid.
Maximum angles
To define objects as unpickable two overall angles can be defined. If the calculated pick frame is bigger than either angle it is seen as unpickable and will not be sent to the robot.
Check collisions with
Pickit also checks for possible collisions in the actual scene. For this, first a robot tool needs to be modeled. And second you have to define with what you want to check collision with: bin and/or other objects. More detailed information on how to use this feature can be found in these articles.