Warning
You are reading the documentation for an older Pickit release (1.10). Documentation for the latest release (4.1) can be found here.
Setup Pickit with a Yaskawa robot
This setup manual helps you setup Pickit with a Yaskawa robot. The setup of Pickit with a Yaskawa robot consists of 4 steps:
Check controller and software compatibility
Pickit is compatible with controllers FS100, DX200 and YRC1000.
The following parameters must be declared on the controller to allow the correct operation of the application. These settings must be enabled by Yaskawa:
Ethernet function set to 1
MotoPlus function set to 1
Macro function set to 1
MotoPlus - Number of files set to 1
MotoPlus - Number of tasks set to 5
Please contact your local Yaskawa affiliate if you need to connect multiple devices to the Ethernet port to check compatibility of all this equipment.
Setup the network connection
Hardware connection
The connection between the Yaskawa controller and Pickit is done over ethernet. You connect your robot controller to the ROBOT port on the Pickit processor as shown in the diagram below:
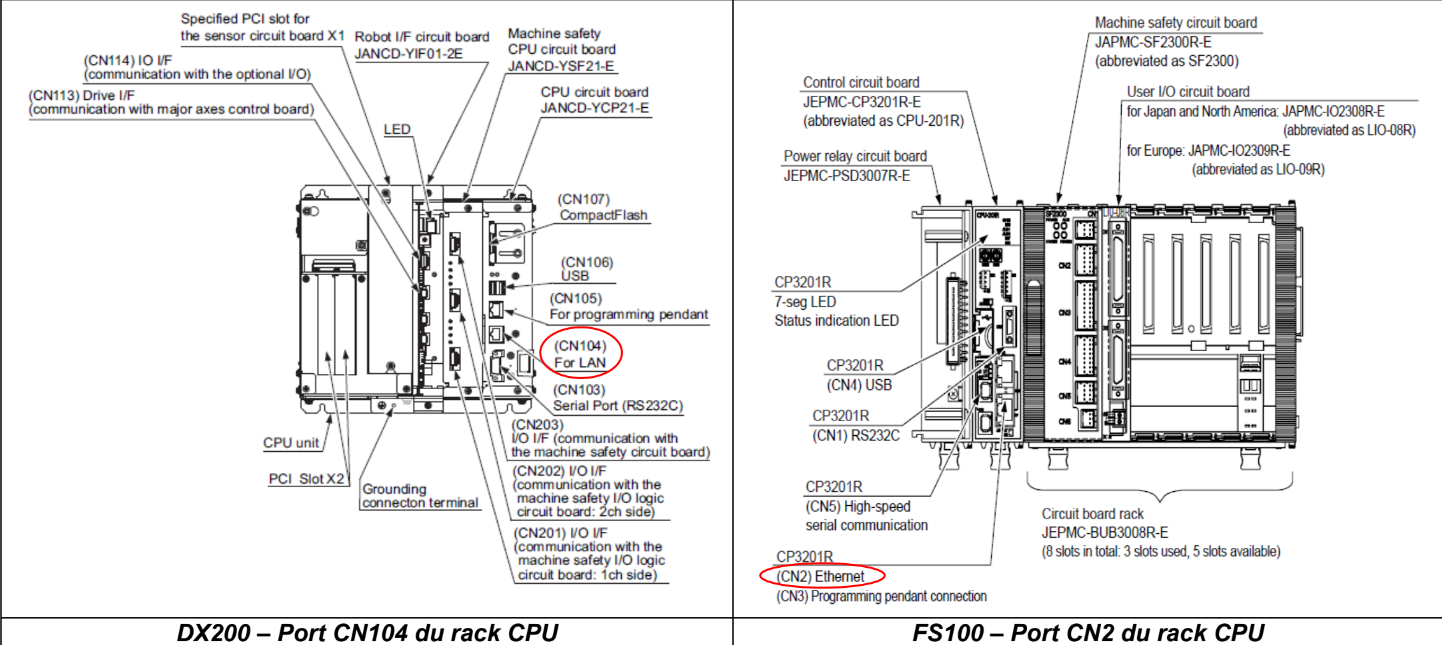
For DX200 controllers you need to connect the Pickit processor to the CN104 port.
For FS100 controllers you need to connect the Pickit processor to the CN2 port.
IP configuration
Warning
The robot controller should be in maintenance mode and the security mode to management mode before making these changes.
Setting the IP address of the robot controller happens in maintenance mode and can be done under SYSTEM → SETYP → OPTION FUNCTION → NETWORK and set the following values:
IP ADDRESS SETTING: MANUAL SETTING
IP ADDRESS: 169.254.5.182
SUBNET MASK: 255.255.0.0
DEFAULT GATEWAY: 0.0.0.0
Setting the Pickit IP address on the robot controller
The address of Pickit needs to be entered in a String. To do this:
Start the robot controller in normal mode
Go to Main menu → VARIABLE → STRING → S099.
Set S099 to value 169.254.5.180
Loading the MotoPlus application
The robot controller should be maintenance mode and the security mode to management mode before making these changes.
Before starting, the MotoPlus application should be placed on a USB dongle. Download the Pickit Yaskawa files here.
Load the correct USB device under SYSTEM → MotoPlus APL → DEVICE.
Open the correct folder where the MotoPlus application is stored under guilabel:SYSTEM → MotoPlus APL → FOLDER.
Load the MotoPlus application under SYSTEM → MotoPlus APL → LOAD(USER APPLICATION).
Test robot connection on Pickit
Details on testing this connection can be found on: Testing the Robot to Pickit connection