Warning
You are reading the documentation for an older Pickit release (1.10). Documentation for the latest release (4.1) can be found here.
Object to reference frame alignment
Note
This setting is only available with the Flex and Pattern engine.
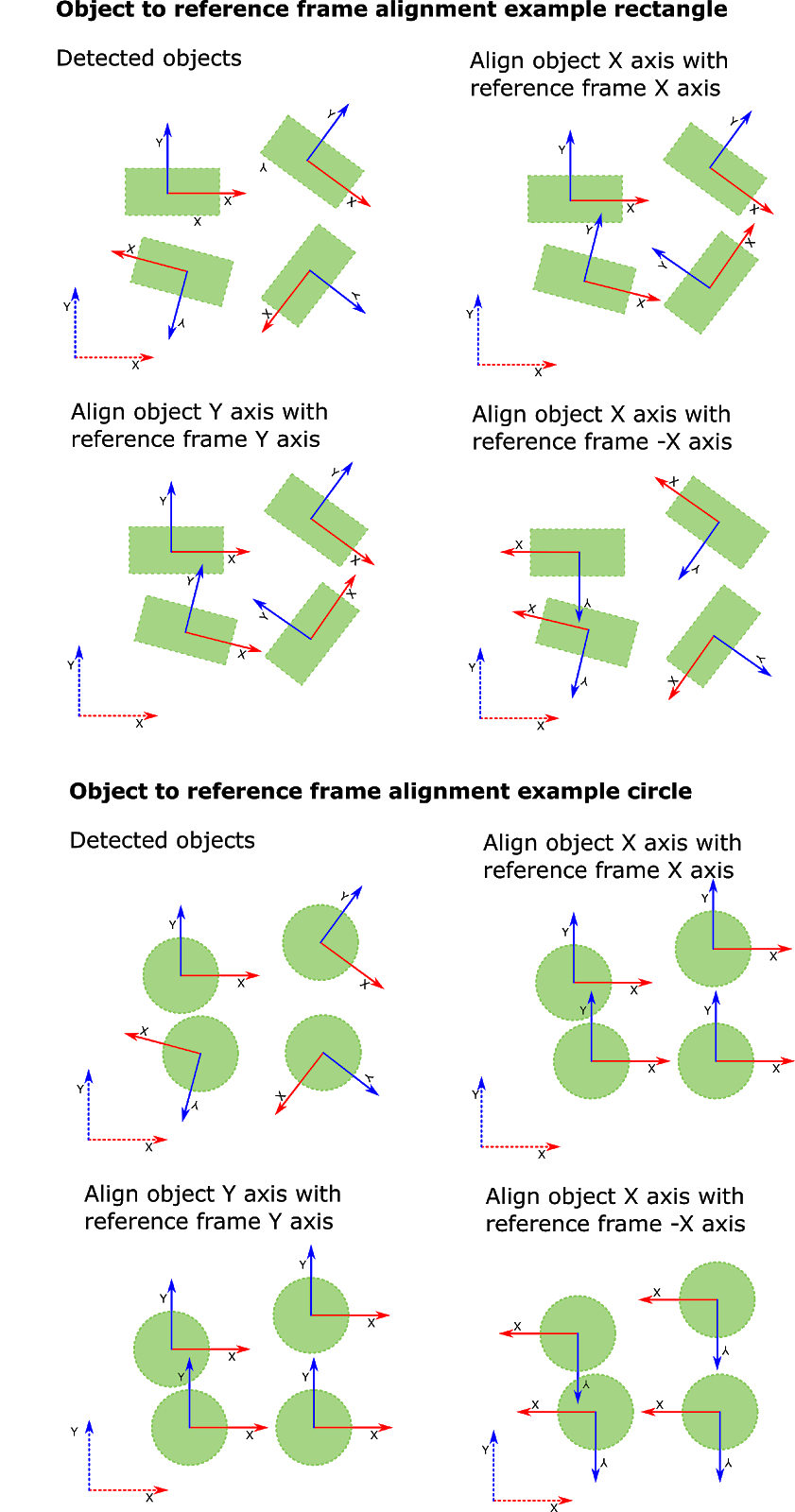
This setting aligns the object frame axis with a reference frame axis. The newly created aligned frame is the pick frame that will be sent to the robot. The setting smartly makes use of the symmetry of an object to decide if object axes can be flipped so they point to the same direction as the selected reference frame axes.
Two settings need to be provided to make this work:
The axis of the object frame to align. The provided options are X or Y.
And the axis of the reference frame to align the object axis with. The provided options are X, -X, Y, -Y, Z or -Z.
The pictures below show examples of the object to reference frame alignment setting for rectangular and circular shapes respectively: