Warning
You are reading the documentation for an older Pickit release (2.2). Documentation for the latest release (4.1) can be found here.
How to make a robot program with multiple threads
When programming a robot with Pickit, a separate thread can be devoted to purely communicate with the Pickit system. The benefits of using a separate thread to communicate with the Pickit system are the following:
Robot program becomes cleaner, as all Pickit commands are in a separate thread.
If the Pickit camera is fixed to an external structure, multiple detection retries can be triggered while the robot is busy, for instance dropping off a part. This saves cycle time when Pickit needs more than one attempt to find a valid detection.
In this article, an example program with multiple threads is shown and elaborated. The example program is for Universal Robots, similar logic can be implemented for other robot brands.
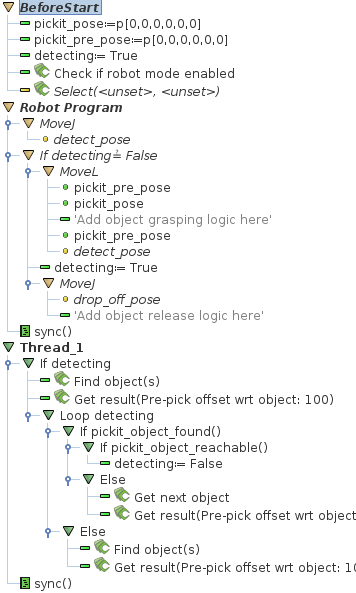
Example program Universal Robots
The logic behind this example program is similar as for the URCap example picking program. Pickit looks for a part, when a part is found the robot picks it and, while dropping it off, Pickit looks again for a new part.
In this robot program two threads are run simultaneously by the robot. One thread controls all robot movements and the other thread controls all Pickit commands. A variable detecting is introduced to synchronize both threads.
When the variable detecting is True, the Pickit system starts triggering detections. The robot can continue to perform actions, but it should not block the field of view of the camera. After a part is successfully detected the variable detecting is set to False. Now the robot is allowed to enter field of view of the camera and pick the part. After picking the part, once the robot gets out of the field of view of the camera, the detecting variable is again set to True, repeating the cycle.
This example program can be downloaded here.