Warning
You are reading the documentation for an older Pickit release (3.1). Documentation for the latest release (4.1) can be found here.
Smart picking examples
This article provides some example applications on how to smartly pick objects with Pickit. It presents in a practical way how to make good use of multiple pick points, symmetry axes, and robot tool flexible pick orientation to increase the likelihood that an object is pickable.
To learn more about how to smartly place objects with Pickit, please take a look at the smart placing examples. There, you will learn how to place objects in a consistent way, while keeping the robot program as simple as possible.
Pick a ring object with a two-finger gripper
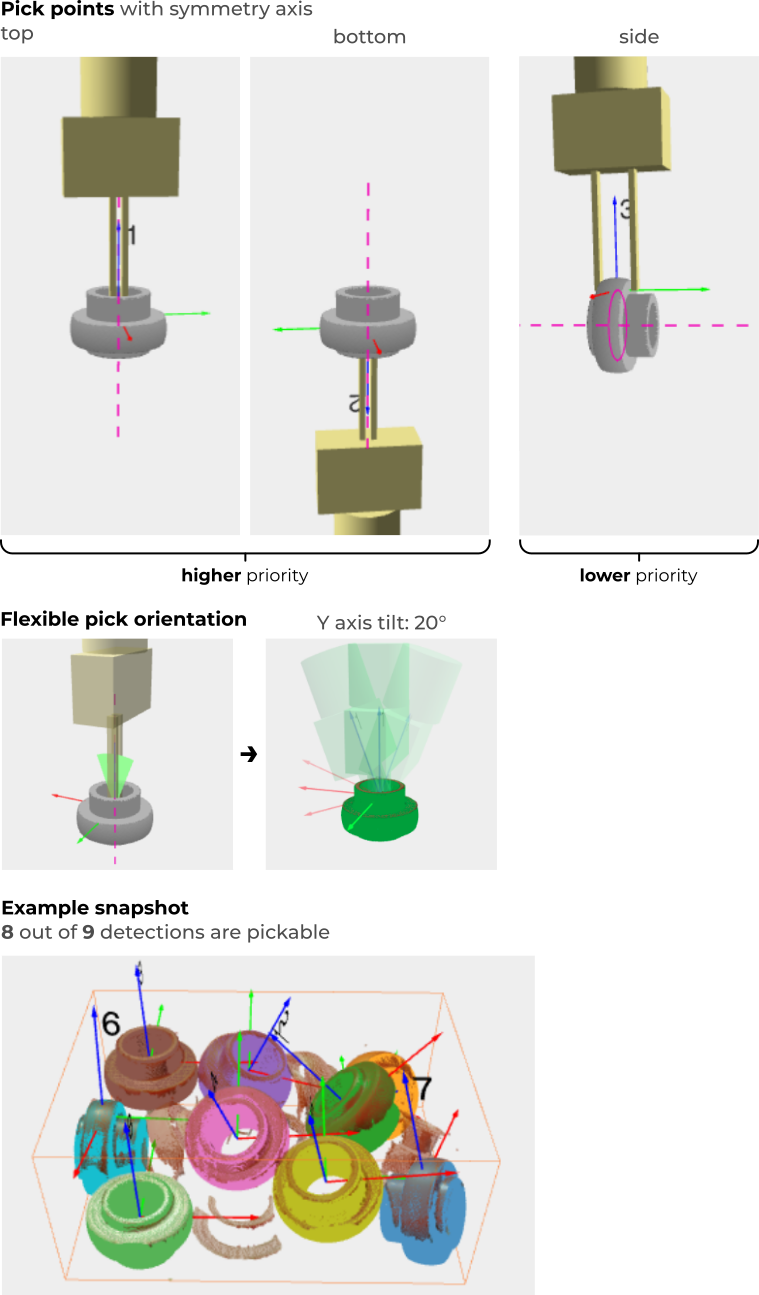
This part has a symmetry axis and it’s possible to pick it from the top, bottom, or side. The picking configuration is as follows:
Three pick points, as it’s possible to pick the part from the top, bottom or side.
All pick points are symmetric about the part’s axis.
The top and bottom pick points are internal grasps on a circular hole, which are self-centering. Since the side pick is not self-centering, it’s given a lower priority.
Two-finger gripper tool model, with a flexible pick orientation that allows a Y-axis tilt.
Note
A similar example can be interactively explored by opening the examples/cad/red_rings.snapshot snapshot.
Pick sockets with a two-finger gripper
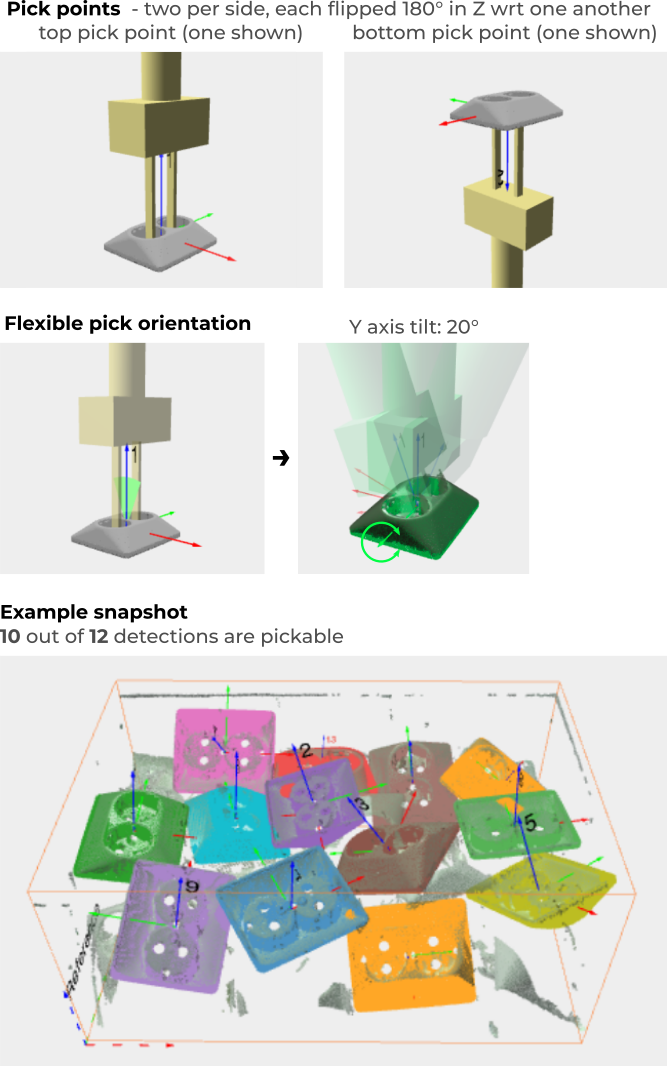
This part has distinct top and bottom sides, and has the following picking configuration:
Four pick points, two on each side. The two pick points of each side have a 180° offset in Z to represent the lateral symmetry of the gripper. Representing this discrete symmetry allows Pickit to choose the one that is closest to the preferred pick point orientation, and potentially minimize robot motions.
Two-finger gripper tool model, with a flexible pick orientation that allows a Y-axis tilt.
Note
A similar example can be interactively explored by opening the examples/cad/white_sockets_gripper.snapshot snapshot.
Pick sockets with a suction gripper
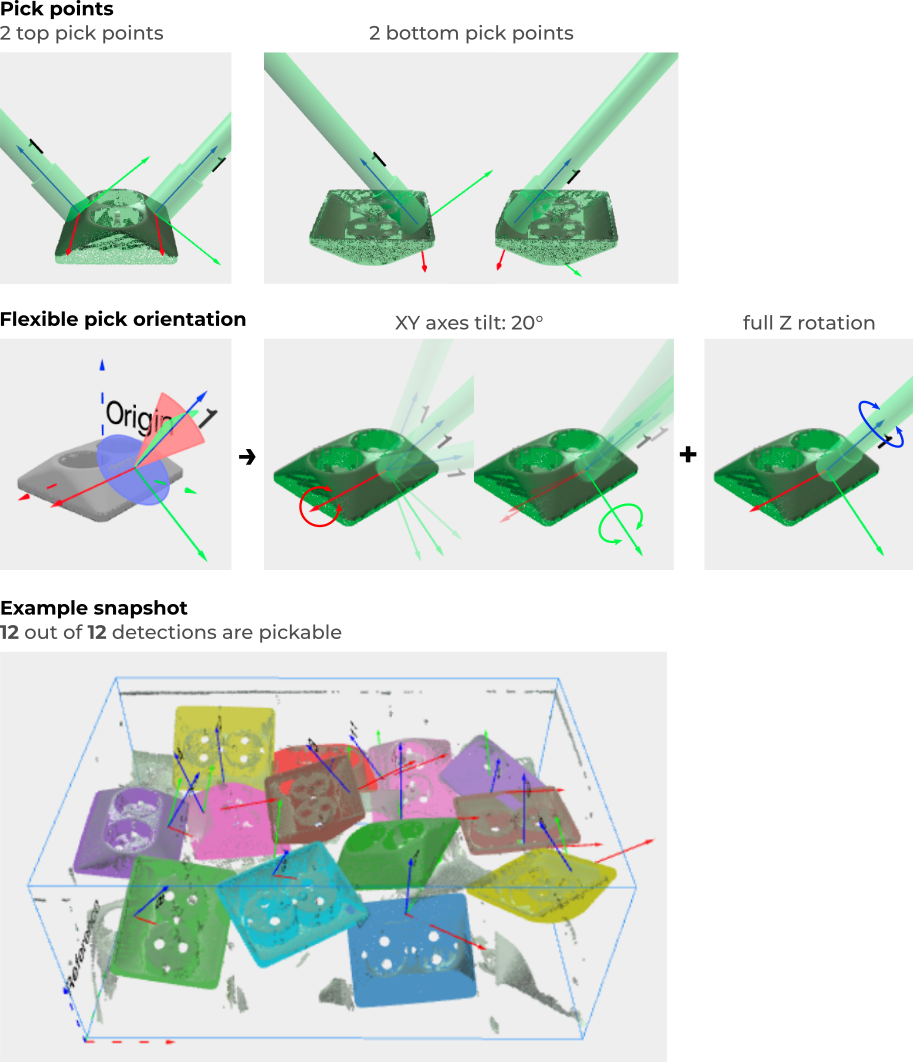
This is the same part as in the previous example, the only difference being that it’s now picked by a suction gripper, instead of a two-finger gripper. It has the following picking configuration:
Four pick points, two on each side.
Cylinder-shaped tool model, with a flexible pick orientation that allows:
XY axes tilt: The flexible bellows at the tip of the suction cup allow tilting in any direction.
Full rotation about Z-axis: The tool is free to rotate about its axis.
Note
Notice the impact of gripper choice on the number of pickable objects: all 12 detected objects are pickable with the suction gripper, while only 10 are with the two-finger gripper.
Note
A similar example can be interactively explored by opening the examples/cad/white_sockets_suction.snapshot snapshot.