Warning
You are reading the documentation for an older Pickit release (3.1). Documentation for the latest release (4.1) can be found here.
How to detect on a bin or pallet larger than the camera field of view?
It can be the case that for some applications, the camera field of view is not large enough to cover the entire detection region. Typical examples are:
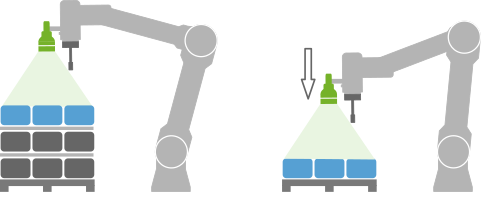
High pallets and deep bins, where the detection region is taller than the recommended camera depth range.
Wide bins and pallets, where the detection region is too wide to fit in the camera field of view.
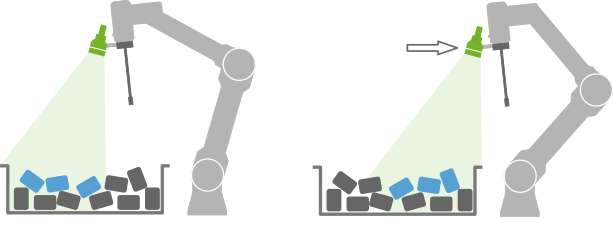
When this is the case, it is recommended to use multiple detection points, as can be done by mounting the camera on the robot. More details can be found in the article that explains when to use a robot-mounted camera.