Warning
You are reading the documentation for an older Pickit release (3.2). Documentation for the latest release (4.1) can be found here.
Setup
In the Setup page you define where you want Pickit to look for objects.
Tip
You can learn about the main ideas behind where to look for objects by watching this video tutorial.
Region of Interest
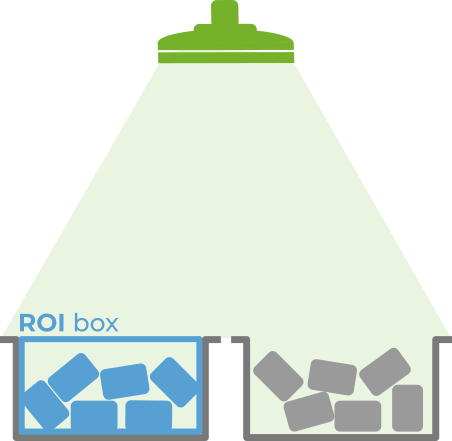
The Region of Interest box (ROI box) is the 3D region where object detection takes place.
In many applications, the field of view of the Pickit camera is greater than the region where we want to perform object detection. For example, in a bin picking application we are only interested in the contents of the bin. In the image below, we compare the camera field of view (3D in the Pickit viewer), with the contents of the ROI box (Points in the Pickit viewer).
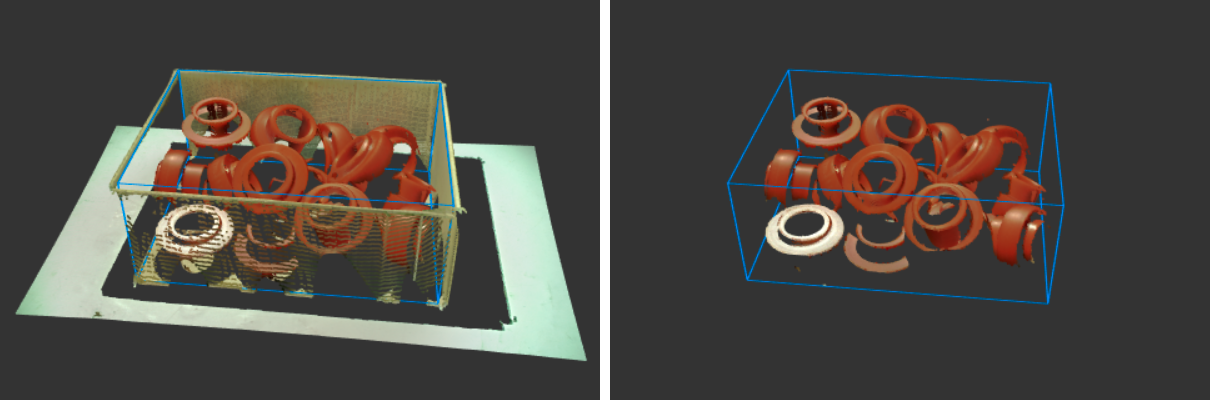
By specifying a correct ROI box, we get faster detection times, as Pickit doesn’t have to look for objects where they are not expected.
The ROI box can also be used to prevent unwanted detections, for example if two bins are visible to the camera, but we only want to pick objects from one. Setting the ROI box around one of the bins will ignore the contents of the other.
The ROI box can be defined and modified from the Setup page of the Pickit web interface, and the points contained in it can be visualized in the Points view.
Collision environment
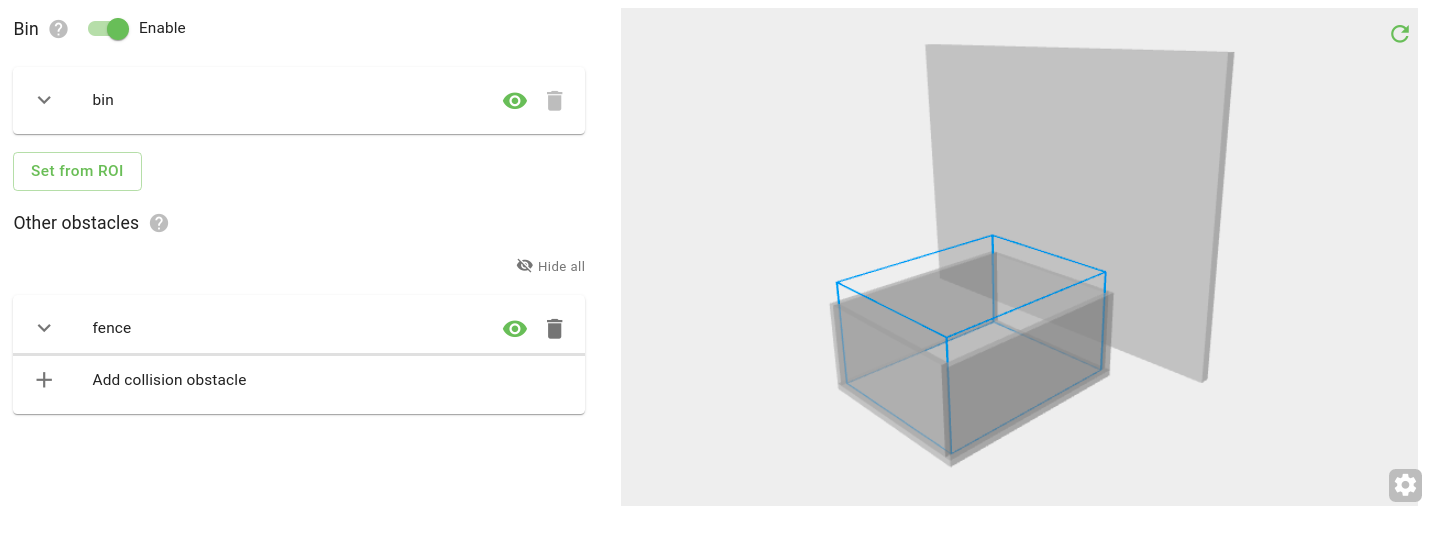
Pickit is able to prevent unwanted collisions of the robot tool at the pick point. The obstacles to prevent collision against can originate from the 3D scene visible to the camera, or from a collision environment defined by the user. The collision environment consists of obstacles whose location does not change over time, and that might not be fully visible to the camera.
Pickit allows to conveniently specify the bin as a collision obstacle (learn more), as well as other obstacles surrounding it, like fences.
Warning
Pickit collision-checks the pick point, not the robot trajectory that would lead to it.
Active cameras
Note
This option is only available if multiple cameras are connected to the processor.
One Pickit processor can be connected to two different Pickit cameras at the same time. This can be any combination of SD cameras, or an HD and SD camera combination. At the moment we do not support two HD cameras connected to the same processor.
Here you select which camera to use in the setup file. Each setup file should have exactly one active camera.