Warning
You are reading the documentation for an older Pickit release (3.2). Documentation for the latest release (4.1) can be found here.
The Pickit URCap interface
Pickit integrates seamlessly with Universal Robots by means of a URCap plugin. This plugin exposes a set of Pickit specific command blocks that make the creation of vision-guided programs simple and easy. This article documents the interface of the Pickit URCap plugin. For installation instructions please refer to the URCap installation and setup article.
Global variables
To use one of the global variables defined by the Pickit plugin, you need to declare it in the BeforeStart section of the program. You only need to declare the variables you actually use in your program.
pickit_pose |
|---|
Pick pose for the latest detection results sent by Pickit, represented as a 6D array. The sequence of commands to get a valid and reachable pick pose is:
Refer to the Pick and place program article for a detailed usecase description. |
pickit_pre_pose |
|---|
Pre-pick pose for the latest detection results sent by Pickit, represented as a 6D array.
The sequence of commands to get a valid and reachable pre-pick pose is the same as for
|
pickit_type |
|---|
Object type, as an integer identifier, for the latest detection results sent by Pickit. The mapping between object shape and identifier follows:
The sequence of commands to get a valid object type is the same as for
|
pickit_dim |
|---|
Object dimensions, in meters, for the latest detection results sent by Pickit, represented as a 3D array. This is how to interpret the array according to the object type:
where The sequence of commands to get valid object dimensions is the same as
for |
URCap Commands
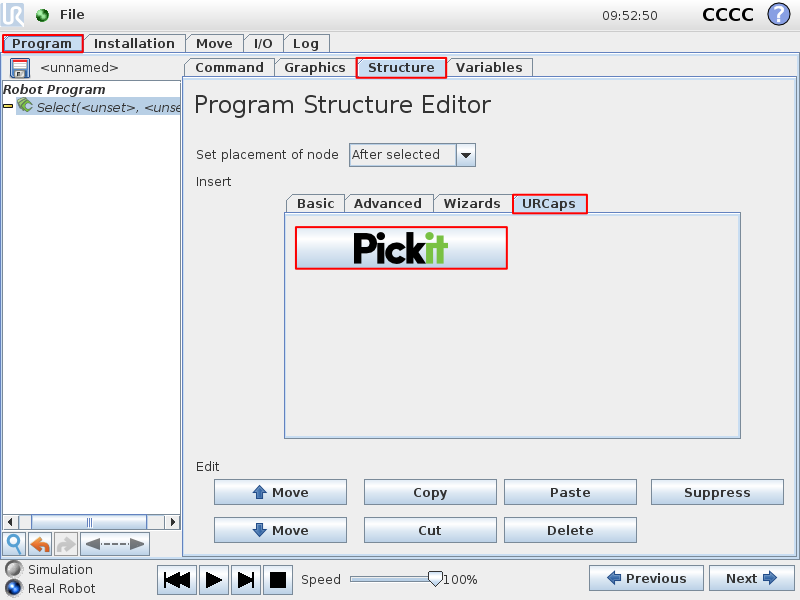
The Pickit plugin provides a set of commands that add to the set of Polyscope’s existing commands. They can be accessed from within the Program tab, under Structure > URCaps, and clicking the Pickit button.
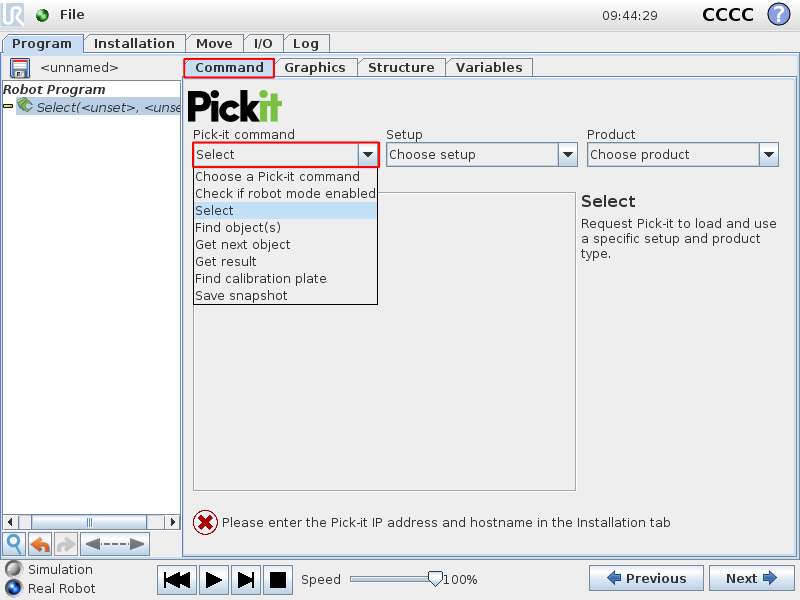
To insert a new command, navigate to the Command tab select an entry from the Pickit command drop-down. When a command is selected, a brief description is shown on the rightmost part of the page. Some commands require the specification of input parameters.
System commands
Check if robot mode enabled |
|---|
Checks whether robot mode is enabled in Pickit.
Except for Find calibration plate, all other Pickit plugin commands require robot mode to be enabled. Robot mode is enabled from the Pickit web interface. |
Detection commands
Find object(s) |
|---|
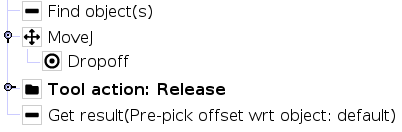
Trigger a Pickit object detection using the currently active setup and product configuration. The next Pickit command after Find object(s) should always be Get result, which waits until a response for the detection request is ready. Note that it’s valid (and sometimes encouraged) to perform robot motions or other non Pickit actions between calls to Find object(s) and Get result, for instance. Refer to the cycle time optimization section of the Pick and place program article for the motivation behind performing robot motions while a Pickit detection is. |

Get next object |
|---|
Request the next detected object. A single call to Find object(s) might yield the detection of multiple objects. Get next object allows to request the next available object, if any, without the need of triggering a new detection and the time overhead it entails. The next Pickit command after Get next object should always be Get result, which waits until a response for the request is ready. It’s recommended to use this command only when objects in the detection region have not moved (significantly) since calling Find object(s). A good example of when to use Get next object is when a detection is unreachable by the robot. An example of when using Get next object is not ideal would be the following bin picking scenario:
When the objects in the detection region have moved, it’s better to re-trigger Find object(s) instead. |

Get result |
|---|
Wait for Pickit reply with detection results.
Get result should always be the next Pickit command after
a Find object(s) or Get next object request. It blocks until a
reply from Pickit is received, and the success of the request can then
be queried by calling
Parameters
|
Configuration commands
Select |
|---|
Loads the specified setup and product configuration. This configuration specifies the behavior of Pickit detections, e.g. what to look for, in which part of the field of view. Parameters
Available configurations are listed in drop-down menus. |
Build background |
|---|
Build the background cloud used in advanced Region of Interest filters. Calling this function will trigger a camera capture, so if the camera mount is fixed, the robot must not occlude the camera view volume. If instead the camera is robot-mounted, the robot must be in the same pose used for object detection. |
Calibration commands
Find calibration plate |
|---|
Trigger detection of the robot-camera calibration plate. This command requires the Pickit web interface to be in the Calibration page, hence robot mode should be disabled. When Pickit is not in the Calibration page, a pop-up is shown. |
Monitoring commands
Save snapshot |
|---|
Save a snapshot with the latest detection results. The saved snapshot can then be loaded or downloaded by going to the Snapshots page on the Pickit web interface and searching for a file whose name contains the capture timestamp. |
Helper functions
As opposed to commands, that don’t have a return value; the Pickit plugin also exposes a number of helper functions that return useful information. They typically are used as the expression of a conditional, such as an if statement, and can be selected from the available functions drop-down.
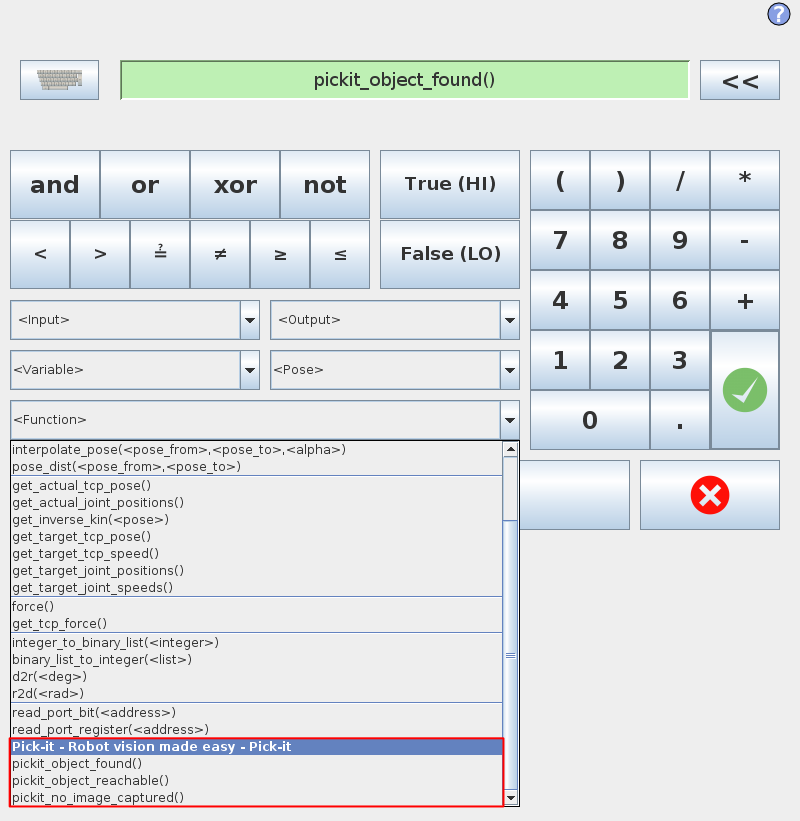
pickit_object_found() |
|---|
Check if the last call to Get result produced valid detection results.
|
pickit_object_reachable() |
|---|
Check if the last call to Get result produced reachable pick and pre-pick poses.
|
pickit_empty_roi() |
|---|
Check if the last call to Get result detected an empty Region of Interest (ROI).
|
pickit_no_image_captured() |
|---|
Check if object detection was unsuccessful due to a failure to capture a camera image. When this is the case, it typically indicates a hardware disconnection issue, such as a loose connector or broken cable. This function can be used as trigger to send an alarm to a higher level monitoring system.
|
pickit_remaining_objects() |
|---|
Get the number of remaining object detections. After calling Get result, this function returns the total number of object detections minus one, as the first object data is available through the Global variables. This value is also equal to the number of times Get next object can be called. As such, the returned value decreases with each call to Get next object.
|