Warning
You are reading the documentation for an older Pickit release (3.3). Documentation for the latest release (4.1) can be found here.
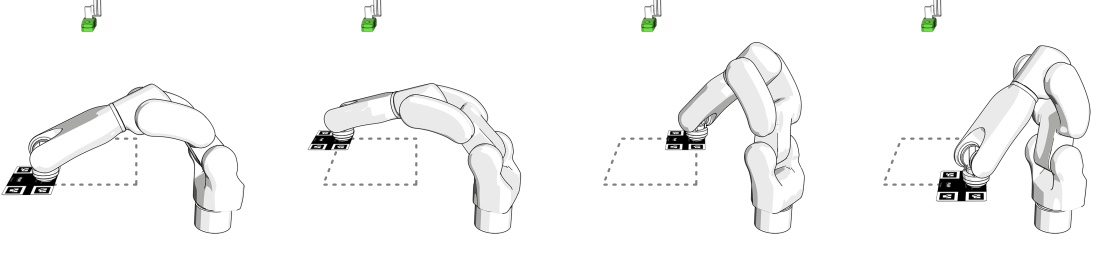
Robot-camera calibration accuracy
For details on the robot-camera calibration refer to the this page. It explains how to get a good robot-camera calibration and how to verify it.