Warning
You are reading the documentation for an older Pickit release (2.2). Documentation for the latest release (4.1) can be found here.
Robot-camera calibration
In this step we do a robot-camera calibration. In the previous chapter we saw that the Pickit system is able to detect parts in its field of view. Now Pickit needs to know where the robot is based so that it can tell the robot where it needs to move to when an object is detected. If you skip this step, the robot will move to a wrong location.
Follow the steps below to do a robot-camera calibration:
Mount the robot-to-camera calibration plate to the flange of the robot. Make sure it is well fixed.
Click on the Calibration button on top of the web interface. Select a stationary camera mount and Multi Poses Calibration for the calibration method. For the robot type, select 6 DOF or 4 DOF depending on the number of degrees-of-freedom (DOF) of your robot. If your robot has only 4 degrees-of-freedom, fill in the distance between calibration plate and robot flange in the field Flange Z-axis.
On your robot open the example multi-poses calibration program supplied by Pickit. Edit the program, defining different waypoints such that the robot shows the calibration plate to the camera at different angles. Confirm that the plate is visible for all waypoints.
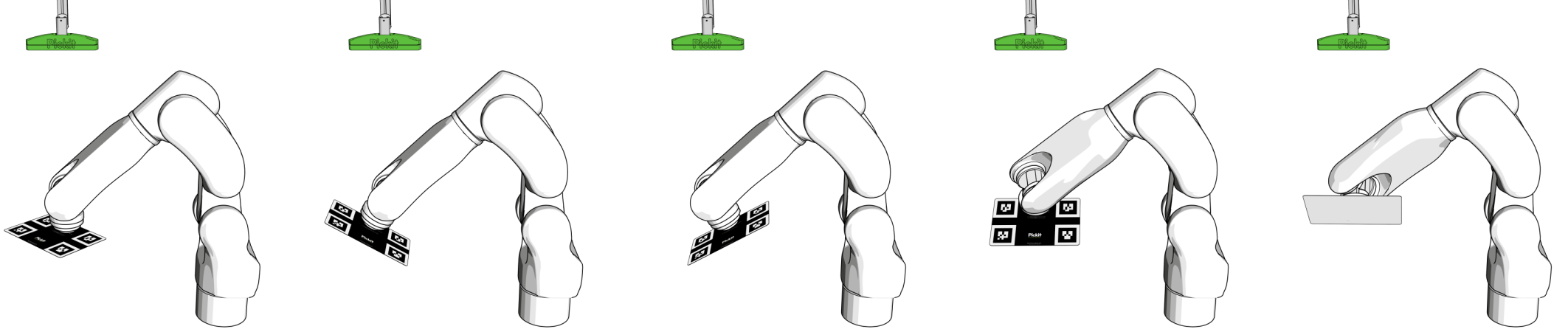
Run the multi-poses calibration program on the robot. Once all five poses are collected, the calibration process is finished.
Check in the 3D view if the position and orientation of the robot model match the actual robot. If that is the case, the calibration plate can be dismounted from the robot, and Pickit is ready for picking.
Tip
You can learn more about robot-camera calibration in the calibration video tutorial and the Calibration article.