Warning
You are reading the documentation for an older Pickit release (3.3). Documentation for the latest release (4.1) can be found here.
Multi poses calibration
Multi poses calibration is the recommended method for performing robot-camera calibration in Pickit. With this method, the robot shows the calibration plate to Pickit from different viewpoints.
Tip
You can learn about the main ideas behind multi poses robot-camera calibration by watching this video tutorial.
The placing of the calibration plate and the poses from which it is detected depend on the camera mount.
Fixed camera mount
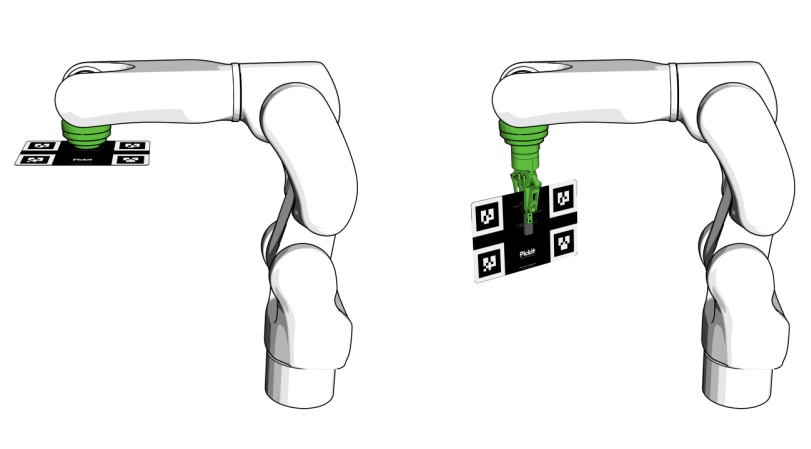
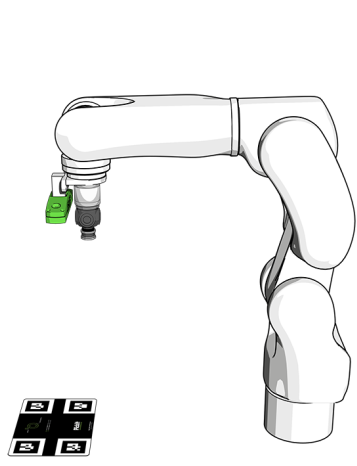
If the camera is fixed to a static structure, the calibration plate must be attached to the robot flange. It does not matter how the plate is mounted, as long as it’s rigidly attached to the flange. It can be, for instance, directly attached to the flange (below left) or grasped by the robot gripper (below right). You should not attach it, for instance, to a suction cup with flexible bellows, as the plate will wobble.
The calibration poses are such that:
The calibration plate is at a distance to the camera similar to the distance at which parts are expected to be picked.
The calibration plate can be correctly detected by Pickit.
The poses are distinct enough to produce an accurate calibration.
The order in which the poses are captured is not important.
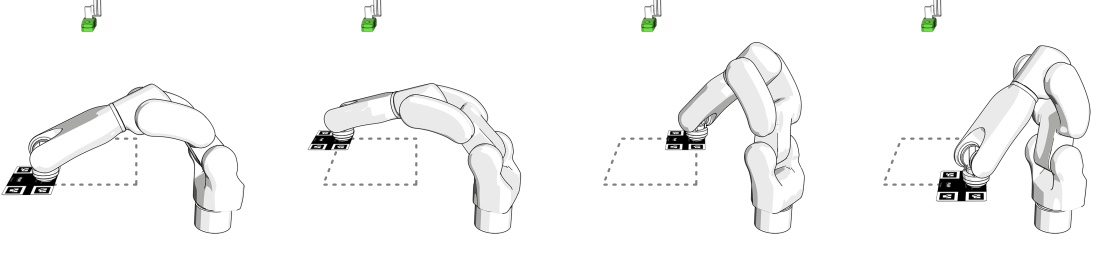
Pickit recommends collecting the ten poses shown below to obtain an accurate calibration. It is however allowed to collect a different amount of poses, as long as their quality is good enough.
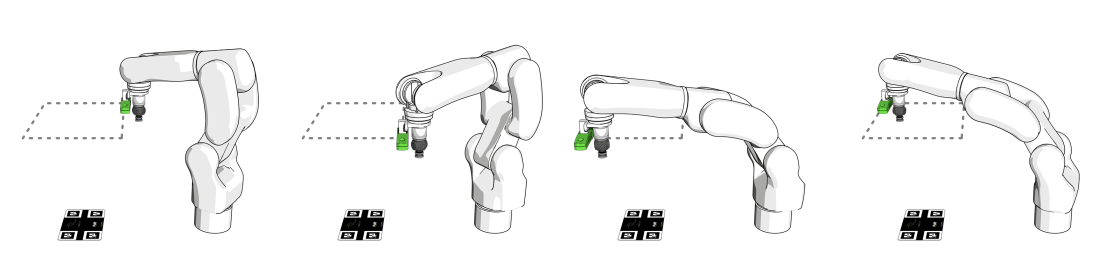
The first four poses capture variation in plate position:
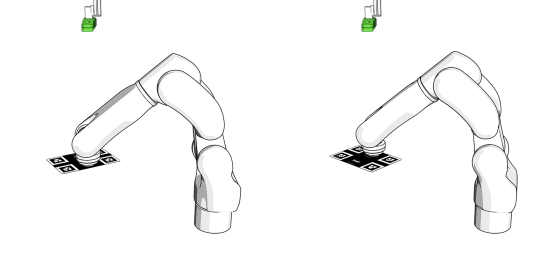
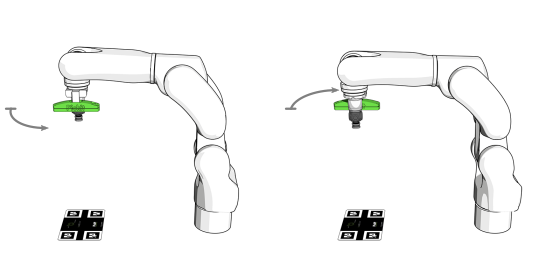
The next two poses capture variation in the camera-facing rotation of the plate:
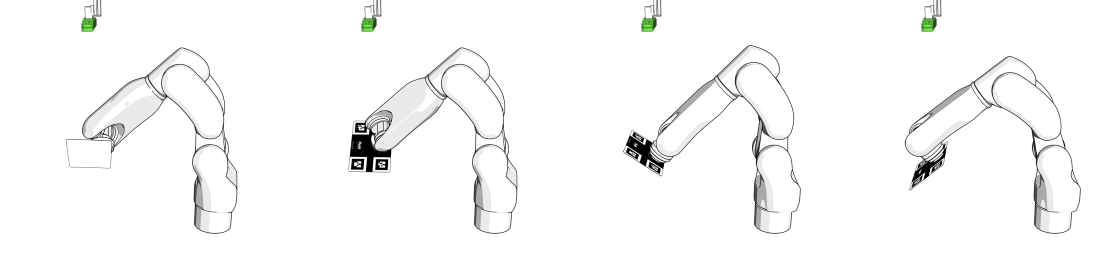
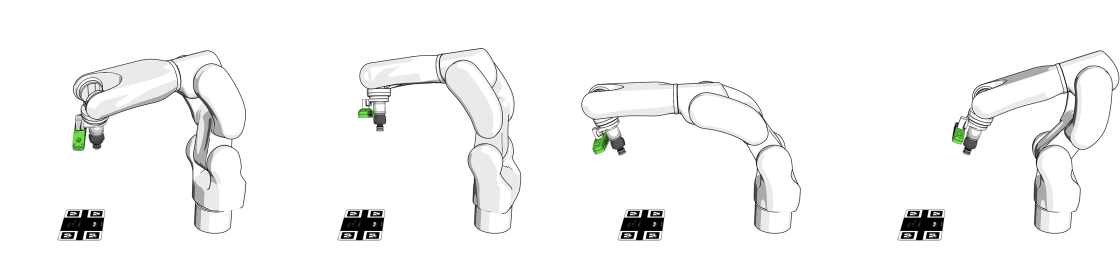
The last four poses capture variation in plate tilt:
Robot mounted camera
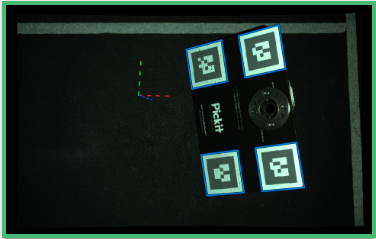
If the camera is mounted on the robot flange, place the calibration plate on a surface, at a distance to the camera similar to that at which parts are expected to be picked.
The simplest choice is to place the plate in the region where picking will take place (as shown above), but it’s also possible to fix it to a wall or other rigid structure next to the picking area. The latter is useful when executing calibration and validation autonomously from the robot, without human intervention.
The guidelines for the calibration poses are similar to those for a fixed camera mount. The only difference is that in this case it is the camera that translates, rotates and tilts, and not the plate.
Pickit recommends collecting the ten poses shown below to obtain an accurate calibration.
The first four poses capture variation in plate position:
The next two poses capture variation in the camera-facing rotation of the plate:
The last four poses capture variation in plate tilt:
Calibrating from the web interface
To perform a new calibration, click the Calibration button on the top bar of the Pickit web interface, and then Start calibration to open the calibration wizard.
Select the camera mount (fixed or robot mounted) and robot type (6/7-axis standard robot or 4-axis palletizing robot).
Place the calibration plate and confirm that it’s visible in the camera view.
Collect the calibration poses.
Validate calibration. In this last step, you can optionally check the correctness of the calibration result (learn more).
Calibration poses collection (step 3 above)
The user is guided with the assistance of the following elements:
2D viewer. The live image in the lower left shows a blue border around visible markers. When the full calibration plate is recognized, the entire image is surrounded by a green border.
Tip
When detecting the plate, make sure that the markers don’t touch the image edges.
Pose collection displays a progress indicator informing how many poses have been collected so far. You can restart pose collection by clicking Clear all poses.

Most robot integrations allow collecting calibration poses manually. When this is the case, you can jog or free-drive the robot to the next calibration pose and click Collect pose.
If your robot integration doesn’t support manual pose collection (Collect pose is not shown), you should write a robot program that takes care of this, as exemplified here.
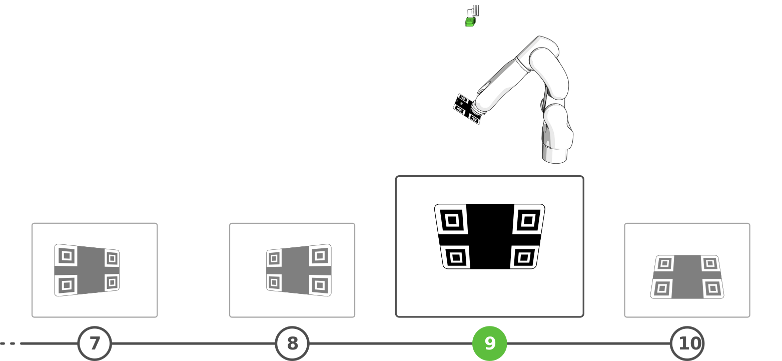
Next recommended pose displays progress of the recommended calibration pose sequence, highlighting which pose to capture next, as it would be seen from an external point of view, as well as from the camera.
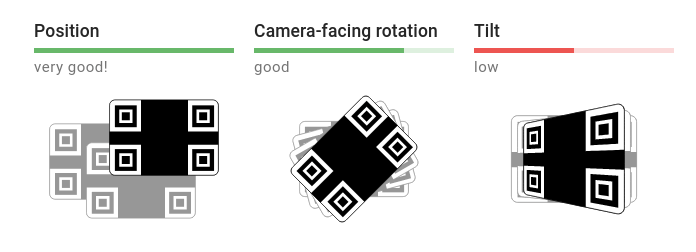
Quality of poses collected so far. When poses are distinct enough for one of the three categories shown below, its score is good and shown in green. When this is not the case, its score is low, shown in red, and the user needs to collect more poses to improve it.
Calibrating from the robot
If you perform calibration often, it’s possible to run calibration autonomously from the robot, without using the Pickit web interface. Refer to the example calibration program, and the documentation of your robot integration to learn more.
4-axis palletizing robots
Palletizing robots have four actuated axes that allow the end-effector to be positioned in 3D space and rotated parallel to the ground plane. That is, the end-effector always points down to the ground plane and cannot tilt away from it, like a 6-axis robot.
Note
In case of a 4-axis robot, the recommendation to use ten recommended calibration poses do not apply. Instead the user should specify at least five poses that exercise position and camera-facing rotation.
If you have a 4-axis palletizing robot, in the last step of the calibration wizard, an additional input that depends on the camera mount is required:
Fixed camera: The vertical distance between the robot base and the camera.
Robot-mounted: The distance between the robot flange and the camera. Notice that, if the camera is mounted at a higher location than the robot flange, this value should be negative.
Tip
Looking at the camera location in the 3D viewer will help you obtaining the correct value.