Warning
You are reading the documentation for an older Pickit release (2.0). Documentation for the latest release (4.1) can be found here.
Check collisions with the robot tool
This setting allows you to discard pick frames that would result in collision. The pick frames can checked for possible collision with the bin and/or other objects.
When collision checking yields that a certain object pose will result in a collision, the object will be labeled as unpickable and not sent to the robot. In the Pickit web interface, unpickable objects are displayed orange in the Objects view and the Detection grid. When clicking on the unpickable object, the modeled tool will appear in the “Objects” tab of the 3D view to illustrate why the given object is unpickable.
Bin
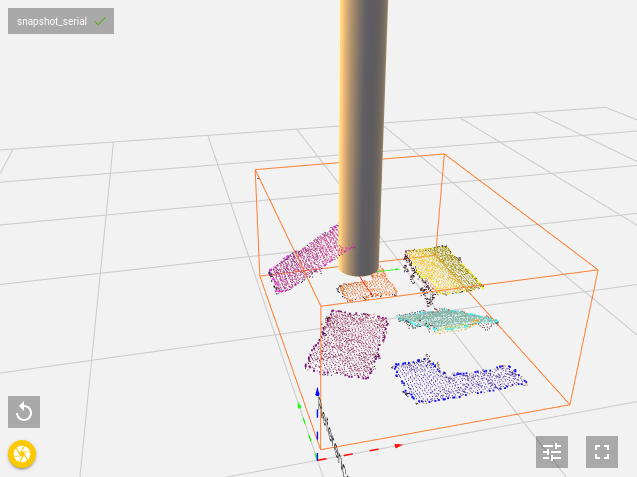
This option checks if the tool is colliding with the Region of Interest. If set the tool is not allowed to hit the sides or bottom of the region of interest box. If the Region of interest box is set to similar dimensions as the actual bin, this option is checking for collisions with the actual bin. A rule of thumb for this to work properly is to set the dimensions of the region of interest box slightly smaller and slightly higher than the real bin.
Other objects
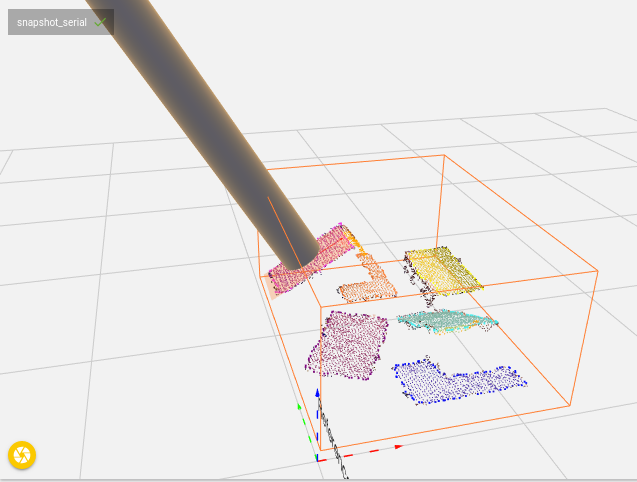
This option checks if the tool is colliding with other objects that are visible in the Region of Interest. As seen in the image below the object is not safe to pick because there is another object on top and the tool would collide with this other object.