Warning
You are reading the documentation for an older Pickit release (2.0). Documentation for the latest release (4.1) can be found here.
Robot tool model
If a collision checkbox is checked, the robot tool model settings are visible. These settings allow you to model your robot tool.
Why is it important to model your robot tool?
In picking applications, it is important to prevent that the robot collides with the bin or potential other objects such that the application can run without interruption. Starting from Pickit version 1.10, it is possible to model the robot tool to closely resemble the actual tool that is mounted on the robot.
By modeling the robot tool more accurately, one can avoid that:
Objects are labeled unpickable although they could be picked without collision (tool modeled too conservative with respect to the actual robot tool).
Objects are labeled pickable although the robot will collide when picking them (tool model dimensions are smaller than actual robot tool models’).
Provided robot tool models
The provided robot tool models are:
Two-finger gripper
Box-shaped tool
Cylinder-shaped tool
The screenshots below show an example of robot tool modelling for the box-shaped tool.
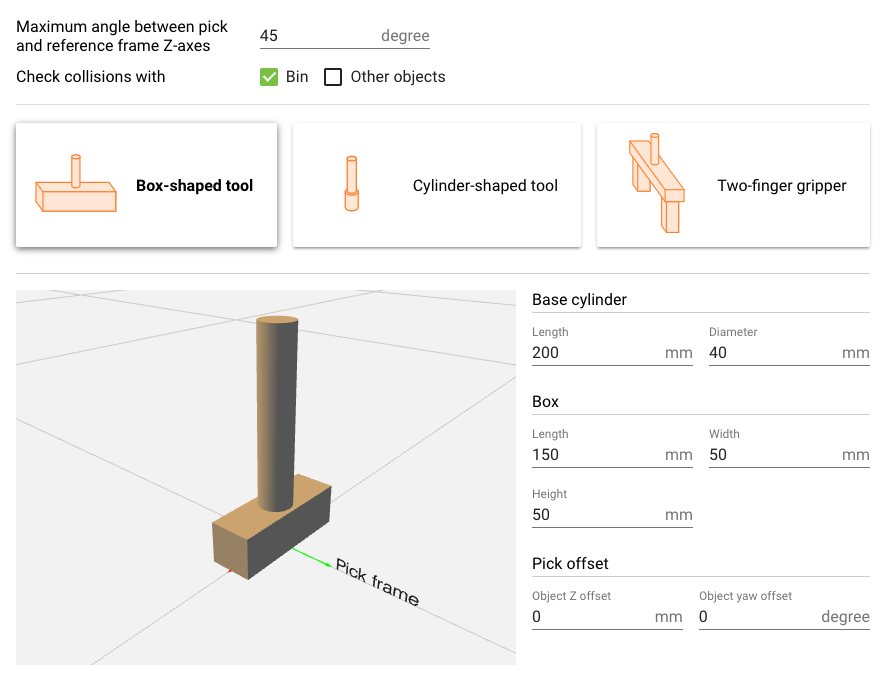
Every tool model can be customized to closely resemble the actual robot tool. Besides the tool dimensions, one can also adapt distance and orientation of the tool wrt. the object’s pick frame. However, be aware that this doesn’t influence how the robot picks an object. These values are only used for collision checking and have no effect on an object’s pick frame.
Note
The tool modelling view is hidden when collision checks are disabled (Neither “Bin” or “Other objects” are selected).