Warning
You are reading the documentation for an older Pickit release (2.4). Documentation for the latest release (4.1) can be found here.
Example calibration program
This robot-camera calibration example program requires the Pickit URCap plugin to be installed in your robot. For installation instructions of both the URCap plugin and the example programs, please refer to the URCap installation and setup article.
On the header bar, go to Program, then Open > Program. Navigate to the pickit_examples/calibration folder and open multi_poses_calibration.urp.
Note
If you want to perform calibration once or infrequently, you don’t need to use this example program. You can teach the calibration poses manually using free-drive and the Collect current pose button in the calibration wizard of the Pickit web interface.
Multi poses calibration
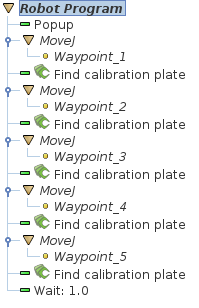
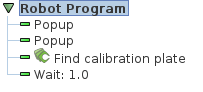
The program starts by opening a pop-up message, informing that multi-poses calibration will be carried out. Before running the program, the user must have the Calibration page of the Pickit web interface open. If this is not the case, it is notified by a pop-up message. Otherwise, the following sequence is repeated five times:
Moves the robot to a waypoint.
All
MoveJcommands are specified with respect to the tool flange (as opposed to the TCP).While teaching the waypoints, it is recommended to have the Calibration page open in the Pickit web interface, where the user can verify whether the calibration plate is visible.
Note
This program is a template, and the waypoints are not set. They must be taught by the user since they depend on the physical environment and location of the calibration plate. Refer to the multi-poses calibration article for guidelines on how the five waypoints should be taught.
Sends Pickit a calibration request, through the command
Find calibration plate.
In the Calibration page, the user can follow the progress of calibration.
Single pose calibration
For single pose calibration, the program consists of one single calibration request.