Warning
You are reading the documentation for an older Pickit release (3.5). Documentation for the latest release (3.4) can be found here.
Pickit example case: Picking and orientation of cups

This article covers an extensive overview of an actual Pickit application where picking and orientation is verified during every cycle of the robot program. We cover the basics of the application as well as the robot program used in this application.
Intro
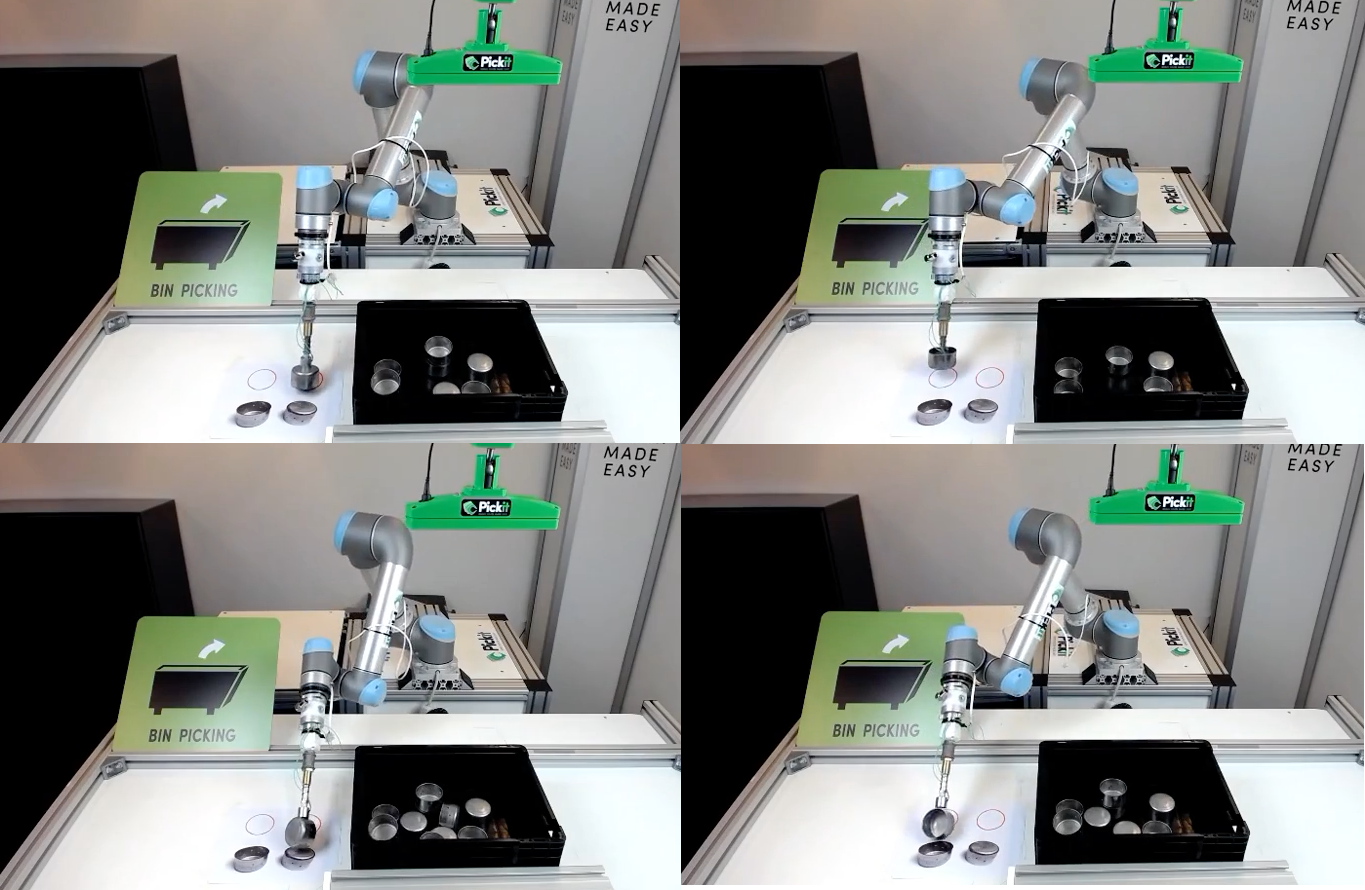
In this application we will try to pick a cylindrical cup form a bin and perform an orientation check on the cup before putting it next to the bin.
The bin picking is done by looking first for circles and when no circles are found, looking for cylinders.
The orientation of the cups is done by looking for a circle when the cup was initially detected and picked as a cylinder and looking for a cylinder when the cup was initially detected and picked as a circle.
So we have already created and saved 2 Pickit setup files and 4 Pickit product files through the Pickit interface.
Two setup files
One setup file for bin picking (where the blue Region of Interest box is aligned with the bin)
One setup file for the orientation check (where the blue Region of Interest box is closer to the camera above the bin)
Four product files
One product file for finding cylinders in the bin
One product file for finding circles in the bin
One for finding cylinders during the orientation check
One for finding circles during the orientation check
Collision prevention is only enabled for the bin picking product files and not in the product files for the orientation check.
Flowchart
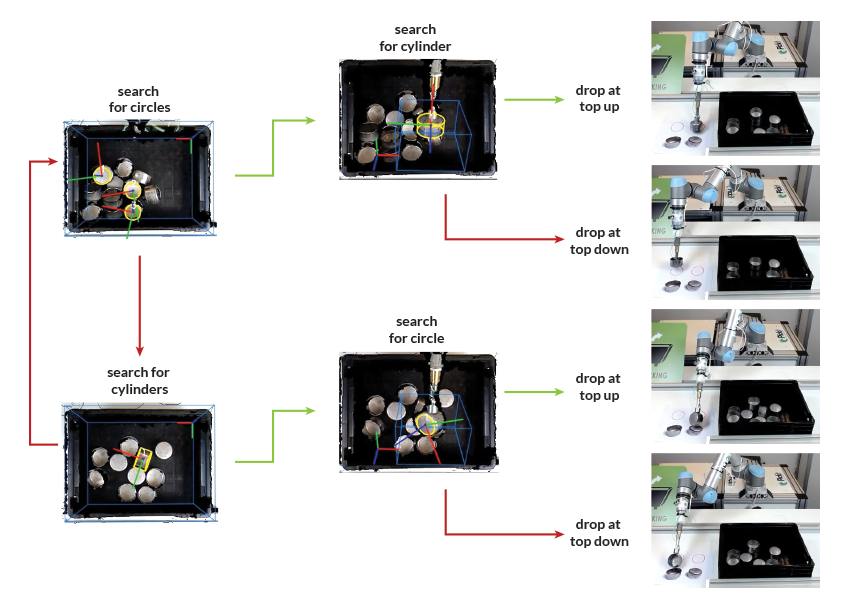
Step by step:
Pickit looks for circles and detects 3.
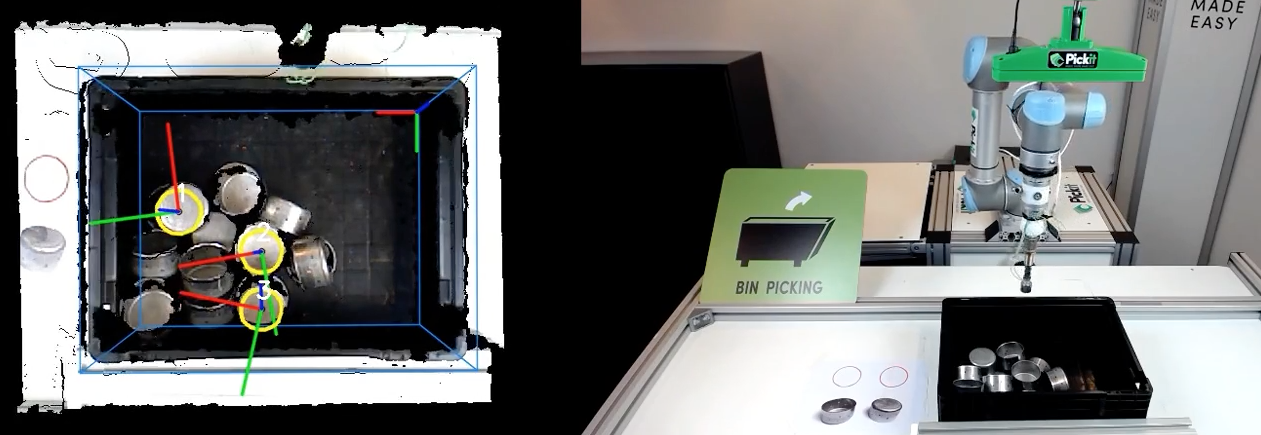
Pickit will only start to search for cylinders when no circles can be detected anymore or all detected circles are not reachable to the robot.
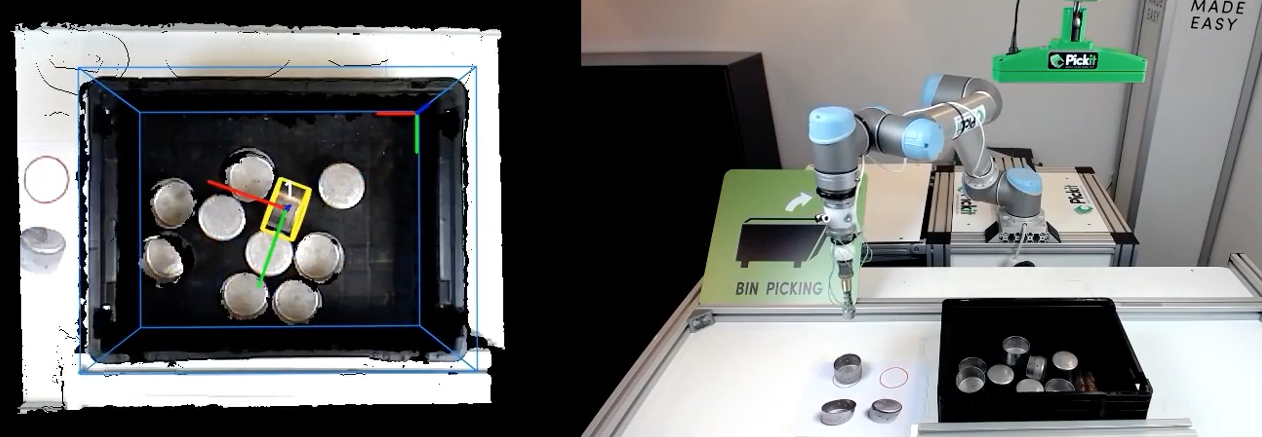
Search for cylinders and detects 1.
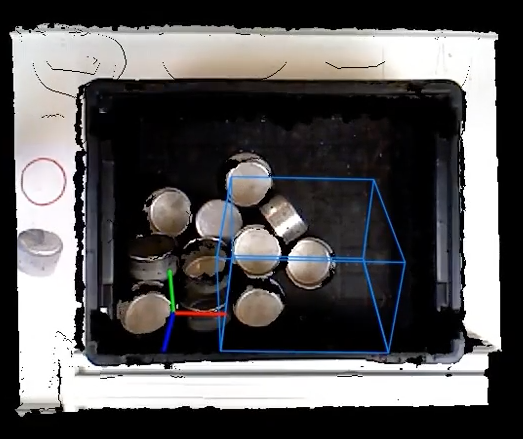
After being picked, the product is shown to the camera. Then a Region of Interest box (virtual blue box) is marked in the space right in front of the robot tool.
In the case that the cup was initially detect as a circle and the robot is grasping the cup from its bottom side, the cup does not enter the Region of Interest and so no detection is made by Pickit.

In the case that the cup was initially detect as a circle and and the robot is grasping the cup from its top side the lateral sides of the cup enter the ROI box, allowing Pickit to see a cylinder.

If the cup was grasped lying on its side, either its top or bottom side is shown to the camera in the orientation check.
If the bottom is showed, Pickit detects a circle.

In the case the other side is showed, Pickit detects nothing, as the cup lateral sides hide a large part of the circular base.

After a successful orientation check, there are 4 ways to drop off the cup. Two for cups with the top side pointing up and another two for cups with the top side pointing down.
A program of 7 steps
This application could be build with a robot program which we will split into 7 major steps. We will explain every step more extensively in the next chapter.
The 7 steps are:
Declare variables and load scripts
Move to a starting position
Look for an object
Pick an object
Check orientation of the object and drop object
Switch the kind of object Pickit is looking for if no objects are safe to pick
Switch the kind of object Pickit is looking for if no objects are found
A generic way of explaining the program
Here we explain all the steps of the program in a generic way and language to introduce the different Pickit commands used for this application.
All Pickit specific commands are marked green and all waypoints are marked blue.
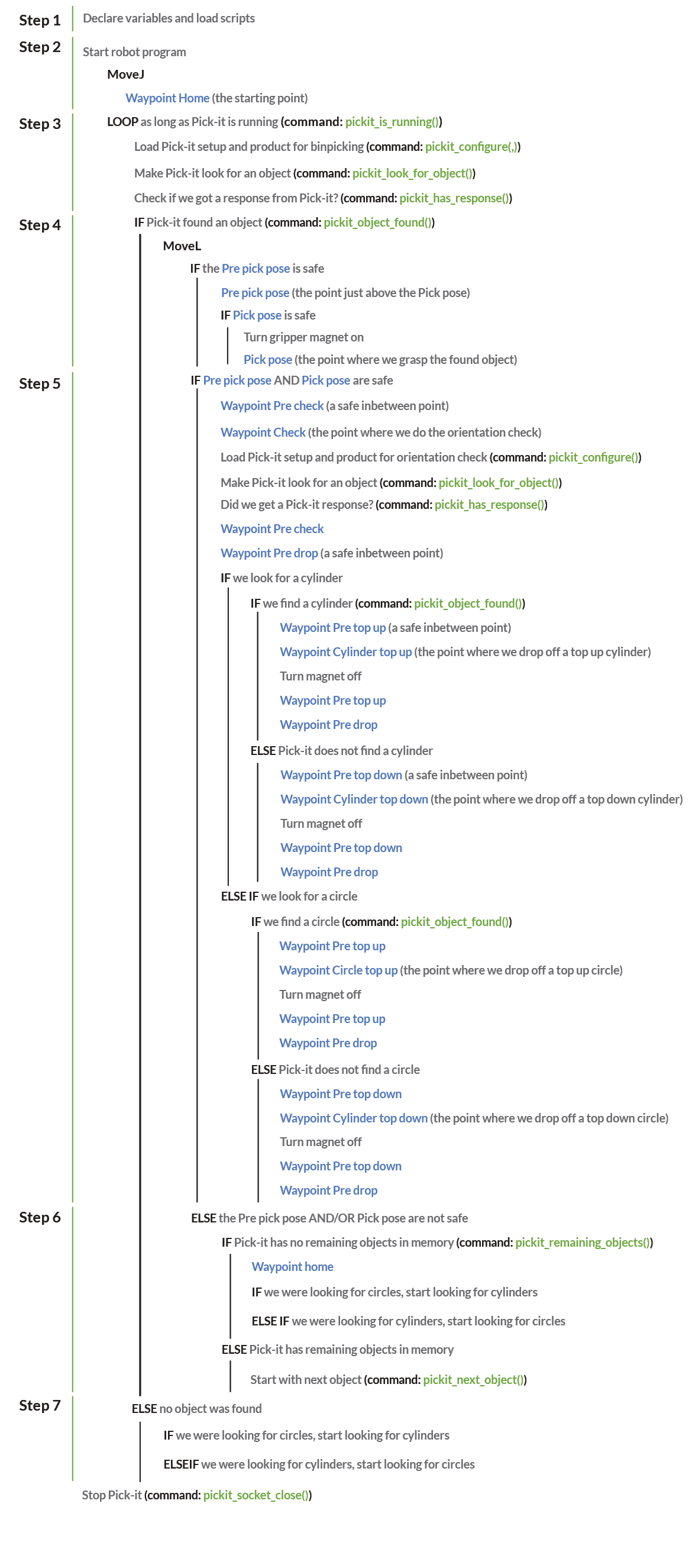
You can view a printable version of this generic program here.
The Universal Robots program
The actual used robot program is a program for a Universal Robot.
First we show the whole program and below we again split every step up into the 7 major steps to explain every aspect of every step.
Whole Universal Robots program
Program
Init Variables
BeforeStart
pickit_port=5001
pickit_ip="169.254.5.180"
actual_pose=get_target_tcp_pose()
pick_pose=p[0,0,0,0,0,0]
pre_pick_offset=p[0,0,-0.1,0,0,0]
setup_bin=354
setup_check=201
prod_cir_bin=164
prod_cyl_bin=299
prod_cir_check=44
prod_cyl_check=343
prod_bin=prod_cir_bin
prod_check=prod_cyl_check
pre_pick_ok= False
pick_ok= False
Script: pickit_functions
pickit_socket_open()
Script: pickit_communication
Script: pickit_transformations
Robot Program
MoveJ
actual_pose
wp_home
Loop pickit_is_running()
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Wait pickit_has_response()
If pickit_object_found()
pick_pose=pickit_get_pose(False)
pre_pick_pose=pose_trans(pick_pose, pre_pick_offset)
MoveL
pre_pick_ok=is_within_safety_limits(pre_pick_pose)
If pre_pick_ok
pre_pick_pose
pick_ok=is_within_safety_limits(pick_pose)
If pick_ok
Set magnet_ON=On
pick_pose
Wait: 0.5
If pre_pick_ok and pick_ok
wp_pre_check
wp_check
pickit_configure(setup_check,prod_check)
pickit_look_for_object()
Wait pickit_has_response()
wp_pre_check
wp_pre_drop
If prod_check=prod_cyl_check
If pickit_object_found()
wp_pre_topup
wp_cyl_topup
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topup
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Else
wp_pre_topdown
wp_cyl_topdown
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topdown
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
ElseIf prod_check=prod_cir_check
If pickit_object_found()
wp_pre_topup
wp_cir_topup
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topup
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Else
wp_pre_topdown
wp_cir_topdown
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topdown
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Else
If pickit_remaining_objects()=0
wp_home
If prod_bin=prod_cir_bin
prod_bin=prod_cyl_bin
prod_check=prod_cir_check
ElseIf prod_bin=prod_cyl_bin
prod_bin=prod_cir_bin
prod_check=prod_cyl_check
Else
pickit_next_object()
Else
If prod_bin=prod_cir_bin
prod_bin=prod_cyl_bin
prod_check=prod_cir_check
ElseIf prod_bin=prod_cyl_bin
prod_bin=prod_cir_bin
prod_check=prod_cyl_check
pickit_socket_close()
Split up Universal Robots program
1. Declare variables and load scripts
Program
Init Variables
BeforeStart
pickit_port=5001
pickit_ip="169.254.5.180"
actual_pose=get_target_tcp_pose()
pick_pose=p[0,0,0,0,0,0]
pre_pick_offset=p[0,0,-0.1,0,0,0]
setup_bin=354
setup_check=201
prod_cir_bin=164
prod_cyl_bin=299
prod_cir_check=44
prod_cyl_check=343
prod_bin=prod_cir_bin
prod_check=prod_cyl_check
pre_pick_ok= False
pick_ok= False
Script: pickit_functions
pickit_socket_open()
Script: pickit_communication
Script: pickit_transformations
Here we first start the program (line 1), and then before the actual start of the program declare some variables and load some scripts.
The pickit_port and pickit_ip must be set to their correct values to enable communication between the robot and Pickit.
The pose of the next detected object to be picked shall be stored in the pose variable pick_pose. For each pick, it is intended that the tool briefly goes to an intermediary position above the actual pick_pose, before picking the object. The pre_pick_offset defines this offset and will be used later, adding a negative translational component to the z-axis of the tool.
From line 9 untill 16 we assign certain Pickit setup file numbers and product file numbers to variables.
On line 19, 21 and 22 scripts containing relevant Pickit functions are loaded.
2. Move to a starting position
Robot Program
MoveJ
actual_pose
wp_home
Here we MoveJ the robot via and intermediate actual_pose position to a waypoint called wp_home.
3. Look for an object
Loop pickit_is_running()
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Wait pickit_has_response()
On line 27 a loop that will keep on as long as Pickit is running is started.
On line 28 the script commands Pickit load the setup file associated with the variable setup_bin and the product file associated with the variable prod_bin. (pickit_configure)
On line 29 the commands Pickit to look for objects. ( pickit_look_for_object())
On line 30 we make the robot program to wait until Pickit has send a response on the pickit_look_for_object() command. (pickit_has_response)
4. Pick object
If pickit_object_found()
pick_pose=pickit_get_pose(False)
pre_pick_pose=pose_trans(pick_pose, pre_pick_offset)
MoveL
pre_pick_ok=is_within_safety_limits(pre_pick_pose)
If pre_pick_ok
pre_pick_pose
pick_ok=is_within_safety_limits(pick_pose)
If pick_ok
Set magnet_ON=On
pick_pose
Wait: 0.5
If Pickit found an object the command pickit_object_found() equals true.
On line 32 we declare the variable pick_pose equals the just received pickit_get_pose. In other words: pick_pose now equals the pose where Pickit told us the object can be picked.
On line 33 we the variable pre_pick_pose as a new pose that equals the pick_pose added with the predefined pre_pick_offset (in this case -10 cm in the Z direction). Like this the pre_pick_pose will always be 10 cm above the pick_pose of a detected object.
On line 34 the robot is commanded to start moving ( MoveL) the robot, but only if the pre_pick_pose is within the safety limits of the robot (= if it is reachable and safe according to the robot).
So if the pre_pick_pose is safe the robot moves there.
On line 38 we check if the pick_pose provided by Pickit is within the safety limits of the robot (= if it is reachable and safe according to the robot).
If this is the case the magnet on the end effector is switched on and the robot moves to the pick_pose. (line 41)
A wait of 0.5 seconds is added to give the magnet some time to really grasp the object.
5. Check orientation of object and drop object
If pre_pick_ok and pick_ok
wp_pre_check
wp_check
pickit_configure(setup_check,prod_check)
pickit_look_for_object()
Wait pickit_has_response()
wp_pre_check
wp_pre_drop
If prod_check=prod_cyl_check
If pickit_object_found()
wp_pre_topup
wp_cyl_topup
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topup
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Else
wp_pre_topdown
wp_cyl_topdown
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topdown
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
ElseIf prod_check=prod_cir_check
If pickit_object_found()
wp_pre_topup
wp_cir_topup
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topup
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
Else
wp_pre_topdown
wp_cir_topdown
Wait: 0.2
Set magnet_ON=Off
Wait: 0.2
wp_pre_topdown
wp_pre_drop
pickit_configure(setup_bin,prod_bin)
pickit_look_for_object()
In this step we check the orientation of the picked object by doing some checks which we explain here.
First the robot moves to a waypoint wp_check via an intermediate point wp_pre_check (lines 44 and 45).
On line 46 the script commands Pickit to load the setup file associated with the variable setup_check and the product file associated with the variable prod_check.
Then on line 47 the script commands Pickit to look for an object, again we wait until there is a response of Pickit coming in.
The next step is that the robot moves to a waypoint wp_pre_check via an intermediate point wp_pre_drop (lines 49 and 50).
Now the real logic behind the orientation check starts:
If Pickit was looking for a cylinder and Pickit found an object we know it was oriented with the top up and drop it of on wp_cyl_topup via wp_pre_topup (lines 51 to 61)
If Pickit was looking for a cylinder and Pickit did not find an object we know it was oriented with the top down and drop it of on wp_cyl_topdown via wp_pre_topdown. (line 51 and 62 to 71)
If Pickit was looking for a circle and Pickit found an object we know it was oriented with the top up and drop it of on wp_cir_topup via wp_pre_topup. (lines 72 to 82)
If Pickit was looking for a circle and Pickit did not find an object we know it was oriented with the top down and drop it of on wp_cir_topdown via wp_pre_topdown. (line 72 and 83 to 92)
In all 4 cases we do a short wait of 0.2 seconds, then but the magnet off, wait again 0.2 seconds and move to wp_pre_drop via an intermediate waypoint depending on the drop off waypoint.
6. Switch the kind of object Pickit is looking for if no products are safe to pick
Else
If pickit_remaining_objects()=0
wp_home
If prod_bin=prod_cir_bin
prod_bin=prod_cyl_bin
prod_check=prod_cir_check
ElseIf prod_bin=prod_cyl_bin
prod_bin=prod_cir_bin
prod_check=prod_cyl_check
Else
pickit_next_object()
In the case Pickit found object, but the objects Pickit found are not safe to be picked (for reason of reachability of safety), we switch the kind of objects Pickit was looking for. We switch from cylinders to circles if we were looking for cylinders and form circles to cylinders if we were looking for circles.
7. Switch the kind of object Pickit is looking for if no products are found
Else
If prod_bin=prod_cir_bin
prod_bin=prod_cyl_bin
prod_check=prod_cir_check
ElseIf prod_bin=prod_cyl_bin
prod_bin=prod_cir_bin
prod_check=prod_cyl_check
In the case Pickit did not find any objects (after the command on line 29), we switch the kind of objects Pickit was looking for. We switch from cylinders to circles if we were looking for cylinders and form circles to cylinders if we were looking for circles.
pickit_socket_close()