Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
Components
An operational Pickit system consists of three mandatory components:
Pickit processor
Pickit camera
Your robot
During the setup, a computer is used to configure the Pickit system. After setup and configuration, the computer can be disconnected.
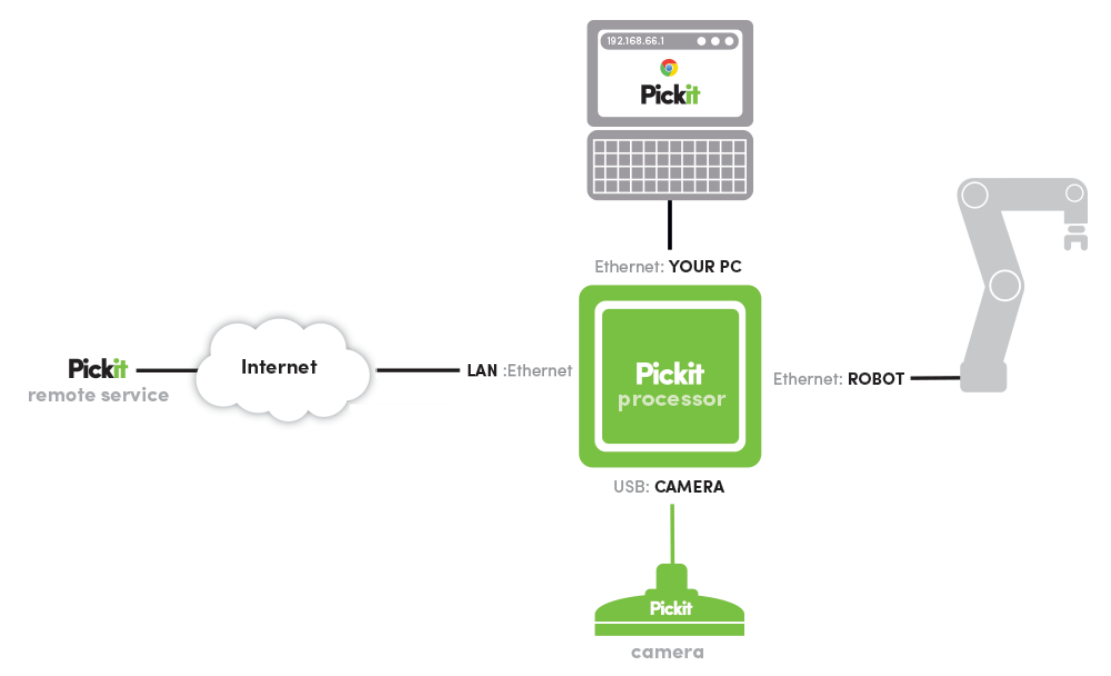
There are two mandatory connections and two optional connections for the Pickit system:
Top: The Pickit processor can be connected via a network cable to any PC for access to the Pickit web interface via any supported web browser.
Bottom: The Pickit camera must be connected to the Pickit processor using the provided USB camera cable.
Right: The Pickit processor must be connected with a network cable to the robot or machine controller. This connection allows the robot and Pickit to exchange commands, status information, object poses and the robot pose.
Left: The Pickit processor can be connected via a network cable to the company network in order to receive remove service from a Pickit engineer over the Internet.