Pick and place program
Loading the program
This example program requires the Pickit URCap plugin to be installed in your robot. For installation instructions of both the URCap plugin and the example programs please refer to the URCap installation and setup article.
In the initialization screen, select Program robot and then Load program. Navigate to the pickit_samples/simple_picking folder and open the simple_picking.urp program. The program is then loaded.
The program explained
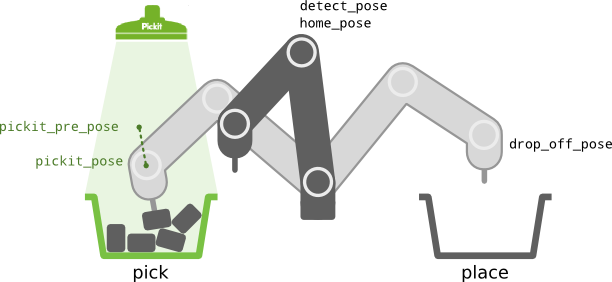
The program implements a simple task where Pickit is used to continuously pick objects from a detection region and place them in a specified location. No assumptions are made on how objects are laid out in the detection region, so the program is a good starting point to build a wide range of applications. Objects can be stacked randomly, or in a pattern, touching or not.
The program assumes a fixed camera mount for simplicity. Please refer to the Robot mounted camera advanced topic to learn how to adapt the example to robot mounted camera setups.
The complete program
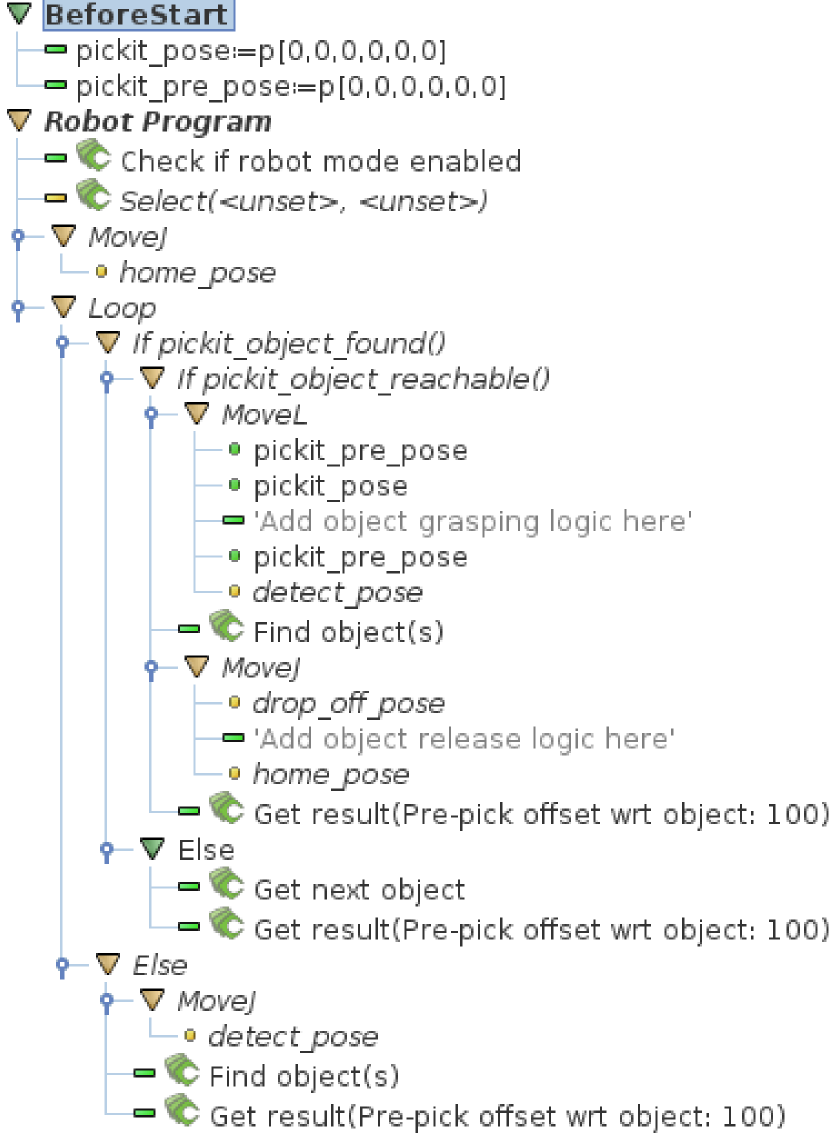
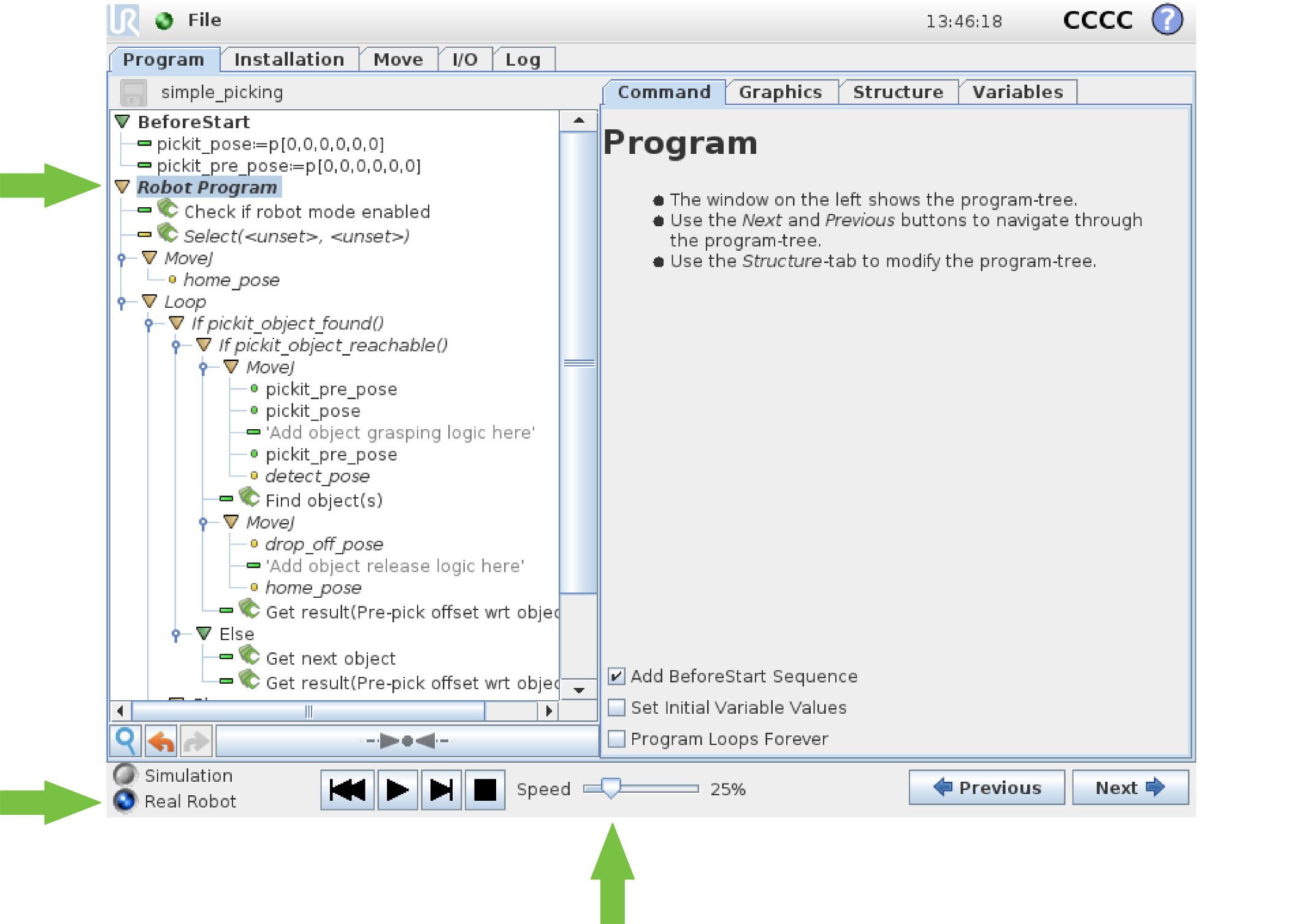
The program is composed by standard URScript commands and commands specific to the Pickit URCap plugin, which are identified by the green gripper symbol. A complete description of available commands can be found in The Pickit URCap interface article.
Commands marked in yellow have uninitialized parameters that must be set by the user before running the program. This is the case for the Pickit Select command, which is explained further down in the document; and for the fixed waypoints home_pose, detect_pose and drop_off_pose, which should be set in accordance to the robot’s environment. In particular, we assume a collision-free transition between adjacent waypoints in the program, e.g. between drop_off_pose and home_pose. We also assume that in detect_pose the robot does not occlude the Pickit camera field of view.
It’s important to have a correctly specified robot TCP, as all MoveJ and MoveL commands are specified with respect to the active TCP. The TCP should be such that when the robot reaches pickit_pose, it can establish a successful grasp.
Program breakdown
The Pickit URCap plugin requires the existence of two global variables named pickit_pose and pickit_pre_pose. The value of these variables is set by the Pickit plugin after a successful detection.
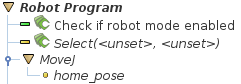
The first commands in the program are run only once. Firstly, the condition that Pickit is in Robot mode is verified using the Check if robot mode enabled command. Next, the Select command loads the setup and product configuration to use for object detection. These are initially unset, which is why the command is marked in yellow. This makes it necessary for the user to specify a setup and product configuration from the list of alternatives available on the Pickit system the robot is connected to.
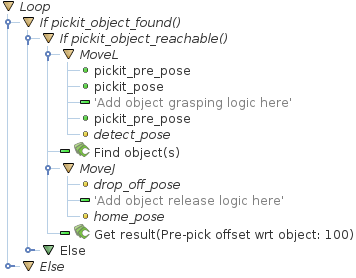
The robot is then moved to the home_pose, from which the detection loop starts. The detection loop is run continuously until the program is stopped, and handles three main cases:
No objects detected → trigger a new Pickit object detection.
Object detected and reachable → perform pick and place sequence and re-trigger object detection.
Object detected but unreachable → get another (potentially reachable) object already detected by Pickit, if any.
What follows describes each case in detail. For clarity, code paths related to cases other than the one being described are collapsed.
No object detected
The detection loop first calls pickit_object_found() to check if Pickit has a detection result available. The first time the loop is entered there are no detection results, as Pickit has not yet been triggered to detect objects; so the Else statement is evaluated.
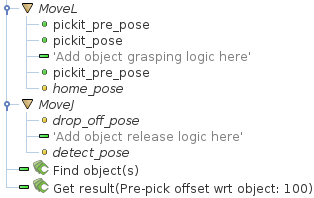
In the Else statement, the robot first moves to detect_pose, from which detections are triggered using the Find object(s) command. We then wait for Pickit to reply with detection results using Get results. When object detection is successful, this command sets the values of pickit_pose and pickit_pre_pose: While pickit_pose is the actual pose for picking the object, pickit_pre_pose is the pickit_pose translated by an offset. In this case, this offset is 100 mm above the object.
As long as there are no detection results, the robot remains in detect_pose continuously looking for objects.
Object detected and reachable
When object detection is successful, pickit_object_found() evaluates to true and at least one object has been found. We only proceed to pick the object when it is also reachable by the robot. The pick and place sequence is detailed below.
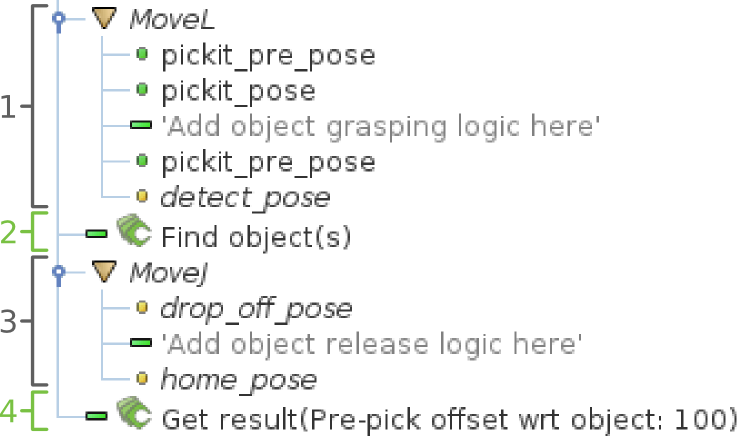
The sequence consists of four parts:
Pick object using the pre-pick and pick poses populated by the last call to
Get Result, and move to the detection pose. Notice linear motions are used.Trigger object detection.
Place object in drop-off location and return to the home pose. This takes place in parallel with object detection.
Get object detection results.
Note that home_pose can typically be the same as detect_pose, but we name the two poses differently to make explicit that in home_pose we don’t trigger Pickit detections. As such, home_pose is not required to prevent the robot from occluding the camera field of view.
Gripping device
Note that logic specific to the gripping device has been explicitly omitted. You should replace the object grasping and release comments with appropriate commands for controlling your hardware, as running the program as-is will only make the robot point to the object to pick. The Gripping devices advanced topic describes an example pick and place sequence for vacuum grippers.
Cycle time optimization
The time it takes for Pickit to detect objects is application-dependent and can vary from a fraction of a second to multiple seconds. To optimize cycle time, we perform object placing (step 3) in parallel to detection of the next object to pick, such that the wait time when calling Get Result is minimal (typically zero). This optimization is relevant in applications with long detection times and tight cycle time constraints. Its benefits are negligible in applications with fast detection times.
The Robot mounted camera advanced topic presents an alternative pick and place sequence where no cycle time optimization is done.
Object detected but unreachable
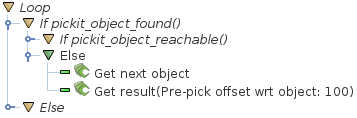
When an object is detected but unreachable, the detection loop checks if there are additional object detections available from Pickit. A single call to Find object(s) might yield the detection of multiple objects, and Get next object allows to access the next available object, if any, without the need of triggering a new detection and the time overhead it entails.
Running the program
Program execution
Attention
Before running the robot program for the first time, make sure that:
There exists a valid robot-camera calibration.
The Tool Center Point (TCP) has been correctly specified.
The robot speed is set to a low value, so unexpected behavior can be identified early enough to prevent the robot from colliding with people or the environment.
Pickit is in robot mode, which is enabled in the Pickit web interface.
In order to run the program in the robot controller, at the bottom of the graphical interface, make sure that Real robot is selected and that the robot speed is set to a safe value. Click on the rewind button to make sure that the program starts from the beginning - the program line Robot Program shall be highlighted, meaning that’s the point at which the program will start. Finally, click on the play button to run the program.
The program execution can be stopped or paused by clicking on the stop and pause buttons respectively.
Monitoring Pickit from Polyscope
The Pickit URCap plugin exposes the view of the Pickit camera highlighted with the Region of Interest and detected object markers (the same as the 2D view in the Pickit web interface). This is very convenient, as it allows to perform basic Pickit monitoring without having to connect a separate computer to the Pickit processor for opening the web interface.
To access the camera view, select any Pickit URCap command on the robot program, and navigate to the Command tab on the right hand panel.
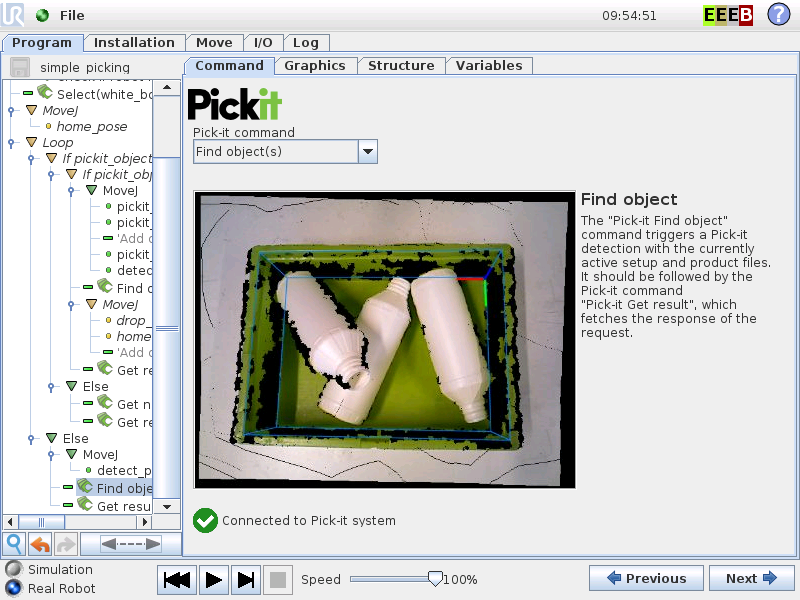
Note that below the camera image there is an indicator of the connectivity with the Pickit system that is constantly updated. This is the appearance of the indicator when Pickit is connected and disconnected, respectively:


Advanced topics
Gripping devices
The pick and place sequence presented in the main article omits details specific to the used gripping device. It also assumes a perfect gripper, i.e. that object picking always succeeds. This section presents a slightly more elaborate picking sequence for vacuum grippers that also handles failed picks. It introduces two signals that interact with the gripper hardware:
vacuum_stopa digital output for controlling a normal-open valve that enables suction when the signal is off / low.vacuum_oka digital input connected to a vacuum sensor used to detect pick success. When vacuum is expected but not present, the pick failed.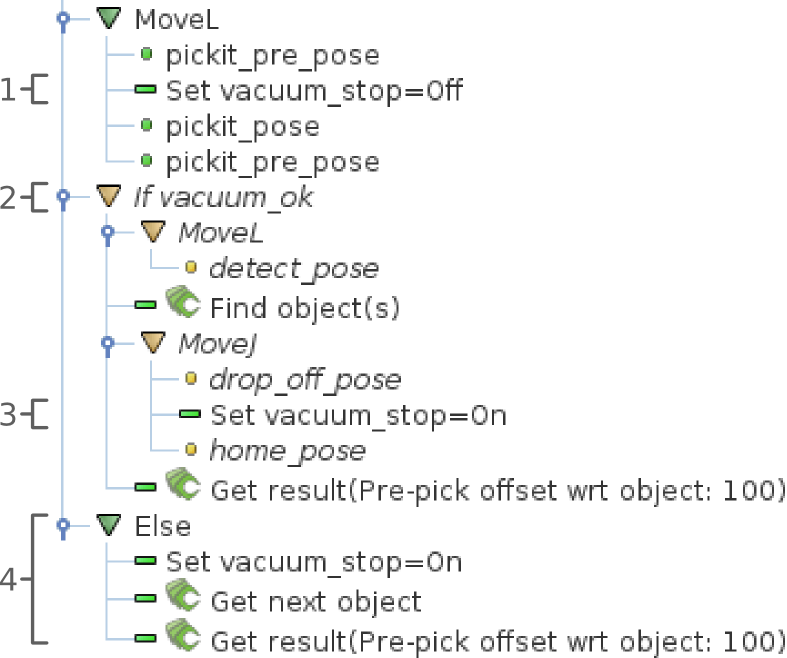
Noteworthy points of this pick and place sequence:
Vacuum is enabled at
pickit_pre_pose, as suction cups typically have flexible bellows which allow initiating the grasp before reachingpickit_pose.Next object detection and object drop-off are only performed if the pick was successful.
Vacuum is disabled to release object at
drop_off_pose.If object picking failed, disable vacuum and get the next available object, if any. If the next object is found and reachable, the next detection loop iteration will directly execute the picking sequence without incurring the overhead of moving back to
detect_poseand waiting for a new detection to complete.
This pick and place sequence applies for the most part to other gripping devices where the pick action can be toggled with a digital output, and the pick success can be queried from a digital input. For instance, for a two-finger gripper the pick action would correspond to closing the fingers, and pick success could be not reaching the end-of-stroke. The only difference in the picking sequence would be that fingers close after reaching pickit_pose, as opposed to vacuum, which is enabled during the approach from pickit_pre_pose.
Robot mounted camera
The example program assumes a fixed camera mount, but can be extended to robot mounted camera setups with minimal changes.
Detection pose
In a fixed camera setup detect_pose is such that the robot is not occluding the camera field of view. In a robot-mounted setup detect_pose must instead ensure that the camera is correctly pointing to the detection region.
Ensure image capture on a stationary robot
When the camera is mounted on the robot, it must be ensured that image capture is done on a stationary robot. If a robot motion starts just after calling Find object(s), it is recommended to briefly wait to allow image capture to complete before starting to move. Image capture takes place only at the beginning of a Pickit detection. In the example program, this only occurs once, in the object detected and reachable case.
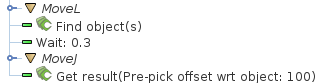
When Find object(s) is immediately followed by Get result, an explicit Wait statement is not required.
Cycle time optimization
The optimization implemented in the pick sequence triggers the next object detection while the current object is being grasped. Depending on the camera fixture, the gripper and the object geometry; it might be the case that the grasped object occludes the camera field of view, making it impossible to trigger a detection with a grasped object. When this is the case and hardware modifications are not an option, the optimization cannot be done. The non-optimized pick and place sequence then becomes:
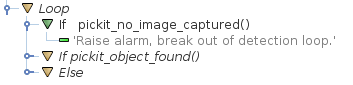
Monitoring camera disconnections
As part of application monitoring, you can add a pickit_no_image_captured() check that verifies if object detection was unsuccessful due to a failure to capture a camera image. When this is the case, it typically indicates a hardware disconnection issue, such as a loose connector or broken cable. This function can be used to send an alarm to a higher level monitoring system that an operator can quickly respond to. This is how the detection loop would look with the added check: