Calibration validation program
This calibration validation example program requires the Pickit URCap plugin to be installed in your robot. For installation instructions of both the URCap plugin and the example programs, please refer to the URCap installation and setup article.
On the header bar, go to Program, then Open > Program, and open pickit_examples/calibration/calibration_validation.urp
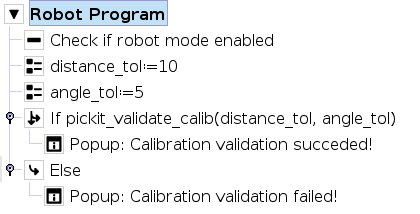
This simple demonstration program calls pickit_validate_calib(distance_tol, angle_tol), specifying the tolerances in millimeters and degrees.
In a real application where robustness is paramount, it might be relevant to perform calibration validation before every production run, or at regular time intervals. In such cases, when the check fails, instead of raising a popup, one might want to automatically run calibration.