Warning
You are reading the documentation for an older Pickit release (3.5). Documentation for the latest release (3.4) can be found here.
M-HD2 and L-HD2 camera cables
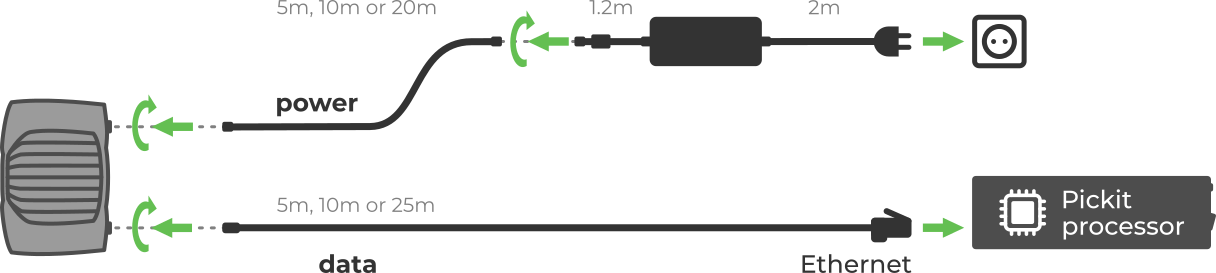
The Pickit M-HD2 and L-HD2 camera uses two separate cables for power and data. Details of the cable characteristics can be found in the respective datasheets, referenced below.

Different options are available depending on the application and required length:
Power cable. It consists of:
A 3m power supply unit + cables (datasheet).
An optional cable extension of 5m, 10m, or 20m (datasheet).
Data cable. Based on Ethernet technology, it consists of a single cable of 5m, 10m, or 25m (datasheet).
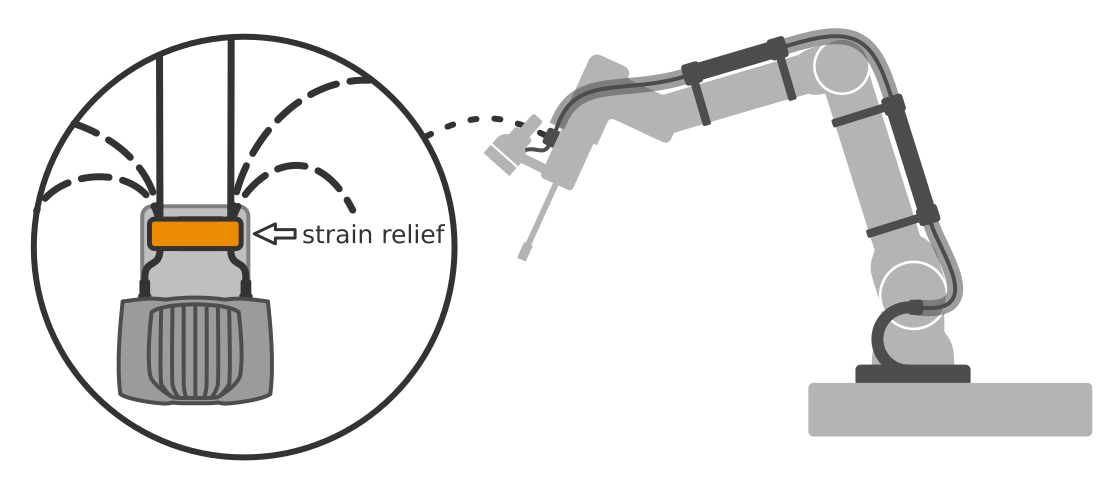
Make sure that on the camera side, both power and data connectors are tightly screwed to their plugs.
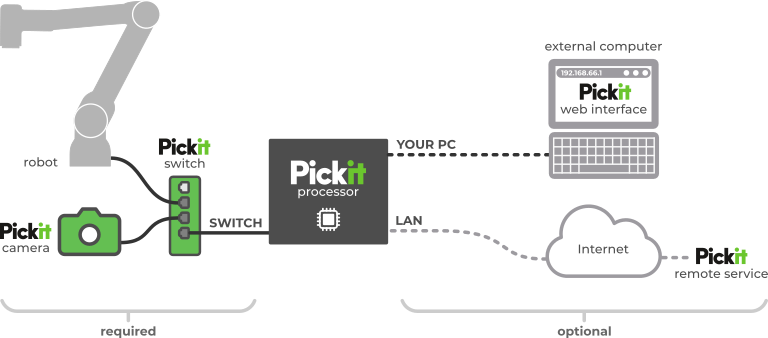
The Pickit processors are equipped with three Ethernet ports: “YOUR_PC”, “SWITCH” and “LAN.” You can select which port to connect your camera through the Pickit web interface. Simply navigate to Settings → Ethernet cameras port and choose your desired port.
The default setting is SWITCH / ROBOT, which involves connecting the Pickit SWITCH to the SWITCH port and then connecting both the camera and the robot to the switch.
Tip
If you have an M-HD2 camera purchased before the 3.4 release you will not have a Pickit SWITCH. This is not an issue, you can continue to use the network connection you were already using.
Note
You can connect the M-HD2 only if your Pickit version is 3.2 or above. The L-HD2 and the use of multiple cameras is supported from Pickit version 3.4 or above.
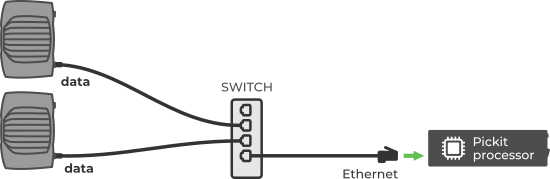
If you are using multiple cameras, connect them to the Pickit switch as shown below.
For fixed-camera applications, we recommend the 10m power cable extension and the 10m data cable. For robot-mounted camera applications, we recommend the 20m power cable extension and the 25m data cable:
It is long enough to be mounted in large industrial robots.
It can resist the bending and torsion typical of robot motions.
It is compliant with the Electrical Fast Transient (EFT) - IEC/EN61000-4-4 immunity standard.
We additionally advise to follow the best practices for routing the cables from the robot base to the camera.