Warning
You are reading the documentation for an older Pickit release (2.3). Documentation for the latest release (4.1) can be found here.
Calibration with an ABB Yumi
When using Pickit with the YuMi robot, the camera should be fixed to an independent structure. A robot-mounted camera configuration is not possible due to YuMi payload limitations. Although YuMi is a robot with two-arms, robot-camera calibration only needs to be performed for one arm. Just be mindful that your calibration program uses a tool frame attached to the arm holding the calibration plate.
YuMi does not have a standard robot flange, as most traditional robots do for mounting equipment. Therefore only multi poses calibration with a fixed camera can be used.
Attention
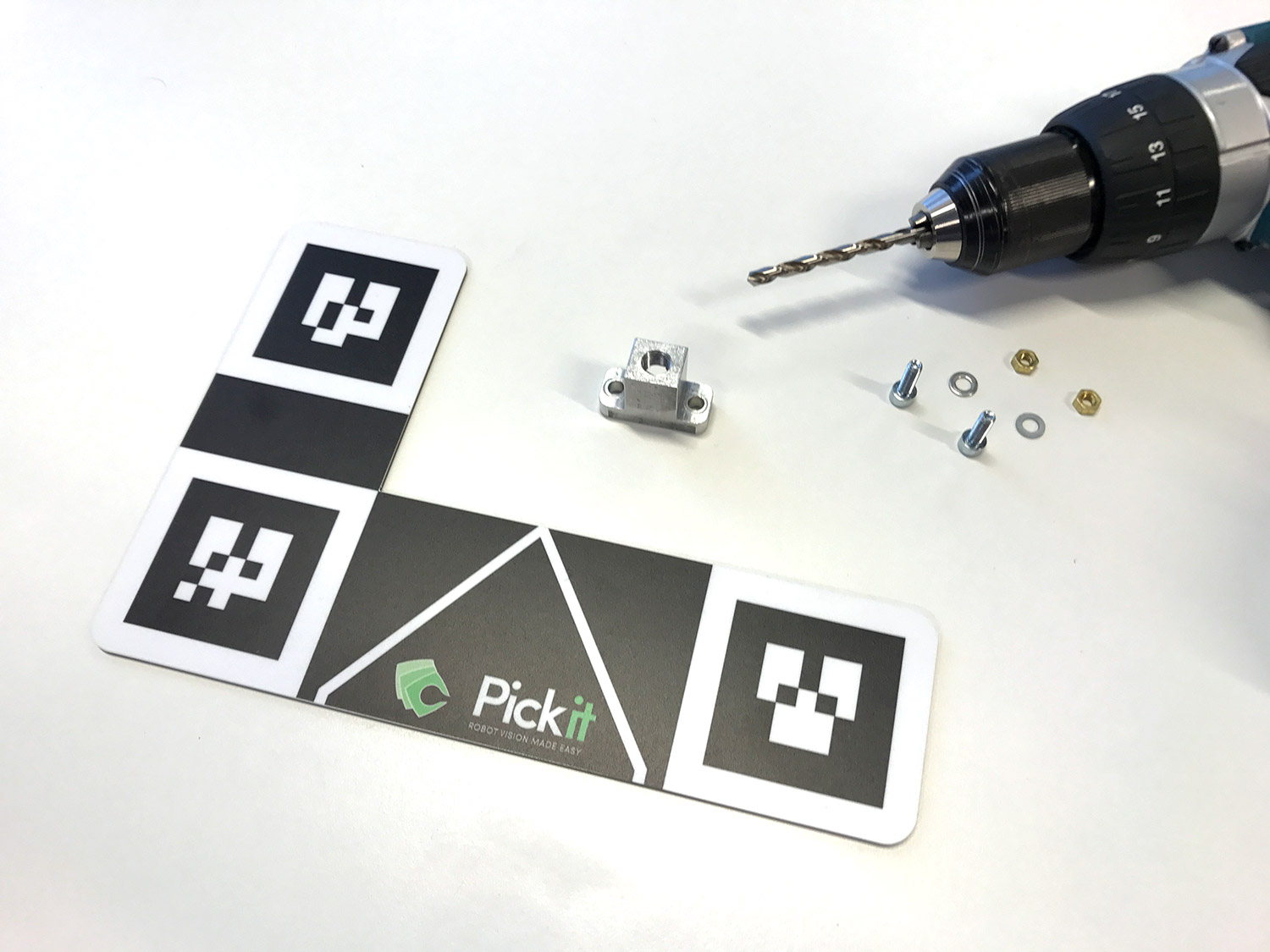
The YuMi robot has a limited workspace for moving the calibration plate around. Therefore, a smaller L-shaped calibration plate needs to be used.

Because it is very important that this plate cannot move with respect to the gripper, during calibration you should attach any piece to the plate that can be grasped firmly by the fingers of your YuMi gripper.
Note
You are free to make holes in the calibration plate as long as they are not touching the three QR markers.
If this is done, you can perform a Multi poses calibration like with any other robot.
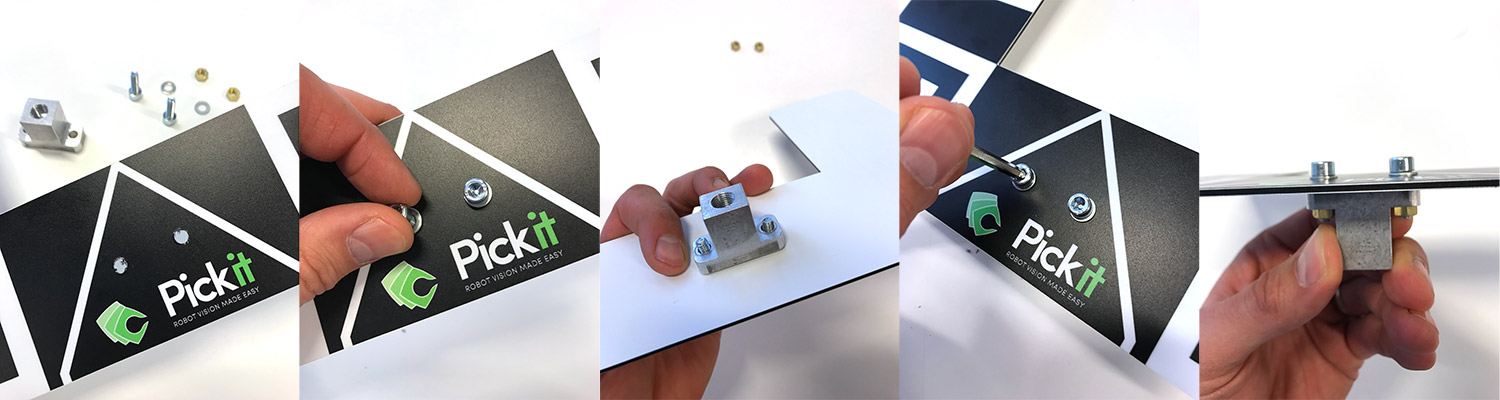
Example of attaching a grasping part to the L-shaped plate