Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
Explaining the Pattern detection parameters
The process of detecting objects with the Pattern detection engine is all about step-by-step testing and fine-tuning parameters until you get a good result. The parameters for Pattern are split into six catagories.
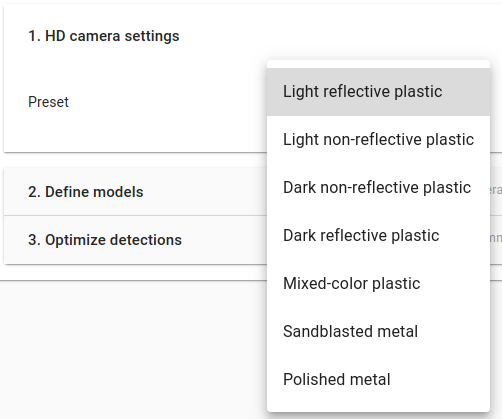
HD camera settings
The HD camera presets are a set of predefined configurations that optimize the captures of images for specific materials. Learn more about choosing a good preset for your application here.
Group points into clusters
Go to Group points into clusters to learn about clustering options.
Reject clusters
Cluster rejection is explained in Reject clusters.
Fit objects to clusters
The parameters in the Fit objects to clusters section are similar as the ones for Pickit Flex. The main difference is that Pattern supports only flat shapes:
Square and rectangle: cardboard packaging, plastic bags, industrial objects.
Circle and ellipse: industrial rings, pipe ends, top of soda cans.
Refer to Fit objects to clusters for a detailed explanation on the remaining parameters in this section.
Define dimensions and orientation of objects
These parameters determine the dimensions and the orientation of objects you want to find.
The key difference between the Flex and Pattern detection engines lies in this section. While in Flex you specify a range of sizes (minimum and maximum length, width, diameter, etc.), in Pattern you specify a fixed size. Furthermore, you also specify the rough orientation of the parts, if they are aligned.
Note
This additional piece of information (orientation and exact dimmensions) allows Pickit to detect objects even if different parts belong to the same cluster (for instance, aligned boxes touching each other). Flex, on the other hand, requires that different parts are grouped into separate clusters.
The effect of modifying the objects shape and orientation can be visualized in the Objects view.
For circles, you can define the diameter, for the other geometrical models you can define length and width.
If the parts are aligned, the expected orientation indicates whether the long side of the objects (X-axis) is aligned with the ROI frame X- or Y-axis. If the parts do not follow any particular alignment, choose an unknown orientation.
With the Remove contour points on ROI boundary and the Threshold, you can remove contour points that are within the threshold distance of the Region of Interest.
Filter objects
These parameters specify filters for rejecting detected objects. Rejected objects are shown in the Objects table as invalid.
Pattern objects can be rejected by setting minimum and maximum values for their size in number of points. Additionally, objects can be rejected depending on the value of the 2D contour score and 2D surface score.
Optimize detections
Refer to Optimize detections to learn how you can make detections faster.