Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
Preferred pick point orientation
When an object model has multiple pick points, a symmetry axis or a tool with flexible pick orientation, there can be some freedom in how the pick point is oriented. The preferred pick point orientation allows to point a pick point axis as close as possible to one of the ROI frame axes, or a specific location, like the ROI frame origin or the ROI center. This contributes to minimize unnecessary robot motions when picking objects, and can have a favorable effect on cycle time.
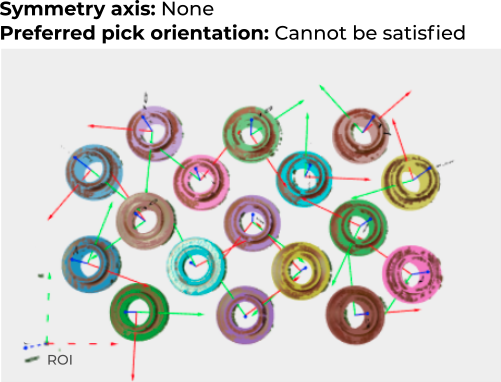
Consider the following example. Because the part in the image below is symmetric, the model can be correctly fit in an infinity of orientations. If the part has a single pick point without symmetry axis, there is no freedom to reorient the pick point. As a consequence, pick points are randomly oriented with respect to the ROI frame (lower left, dashed axes).
If a symmetry axis is defined, the pick point can now fully rotate about it. It can be seen below how the symmetry is now exploited to fully align the objects with the requested ROI frame axis.

Finally, if this is a bin picking scenario, we are also interested in preventing collisions between the robot tool and the bin. As a result, it can be seen that the preferred orientation is used as long as it’s collision free. The pick point diverges from the preferred orientation only for a few objects, for collision prevention purposes.
