Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
What is the ideal distance to mount the Pickit camera?
The distance between the camera and the parts to detect plays an important role in getting high-quality detections out of your Pickit system. The following guidelines will help you to find the camera mounting distance that works best for your application:
The distance between the camera and the objects to detect should be within the minimum and maximum values documented in the camera specifications for the application.
For example, the Pickit L camera has a bin picking and a depalletizing zone, each with its own recommended minimum and maximum distances.
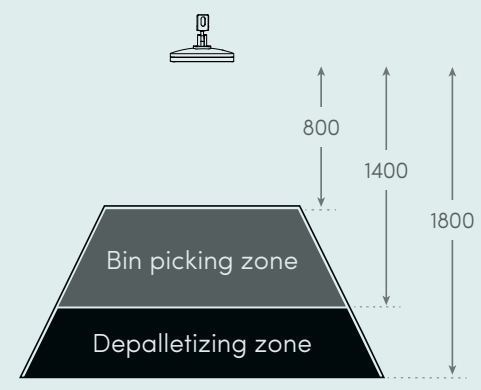
When objects can be at different heights, such as when emptying a bin, make sure that the closest objects (full bin) are not closer than the minimum recommended distance, and that the furthest objects (empty bin) are not farther away than the maximum recommended distance.
Taking into account the above constraint, the camera should be as close to the objects as possible, while still capturing the desired field of view.
Moving the camera closer to the objects produces more detailed captures of the scene, which leads to more precise detections.
Moving the camera away from the objects allows capturing a bigger the field of view.
In some applications objects can be at a height range that exceeds the depth range of the camera, as can happen with deep bins and high pallets. It can also happen that a bin or pallet is wider than the camera field of view. When this is the case, refer to the article about detecting on bins and pallets larger than the field of view.
Note
After positioning the camera, make sure that it is rigidly fixed to the mounting structure or robot. Vibrations caused by robot motions or other machines operating nearby might slightly alter the camera position, invalidating the robot-camera calibration and resulting in picking errors.
If the camera is robot-mounted, make sure that it is also well-protected against unexpected collisions with the environment.
Pickit cameras ship with a ball-joint mount that can be locked in position. However, this mount is not rigid and doesn’t protect the camera against unexpected collisions. For production settings, once you have found a good camera position we recommend switching to a custom rigid mount, as exemplified by the Pickit billet picker below.

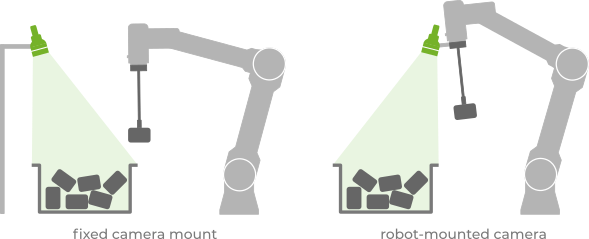
Robot position during image capture
When object detection takes place, the robot should be located in a position that is adequate for image capture, which depends on how the camera is mounted:
For a fixed camera mount, the robot with a picked part should not occlude the camera view, and the expected robot motions should not collide with the camera.
For a robot-mounted camera, the robot should be placed in a way that the above distance recommendations hold.