Warning
You are reading the documentation for an older Pickit release (3.0). Documentation for the latest release (4.1) can be found here.
URCap 2
Interface documentation
Pickit integrates seamlessly with Universal Robots by means of a URCap plugin. This plugin allows to perform vision-guided pick and place with minimal programming effort. For installation instructions please refer to the URCap installation and setup article.
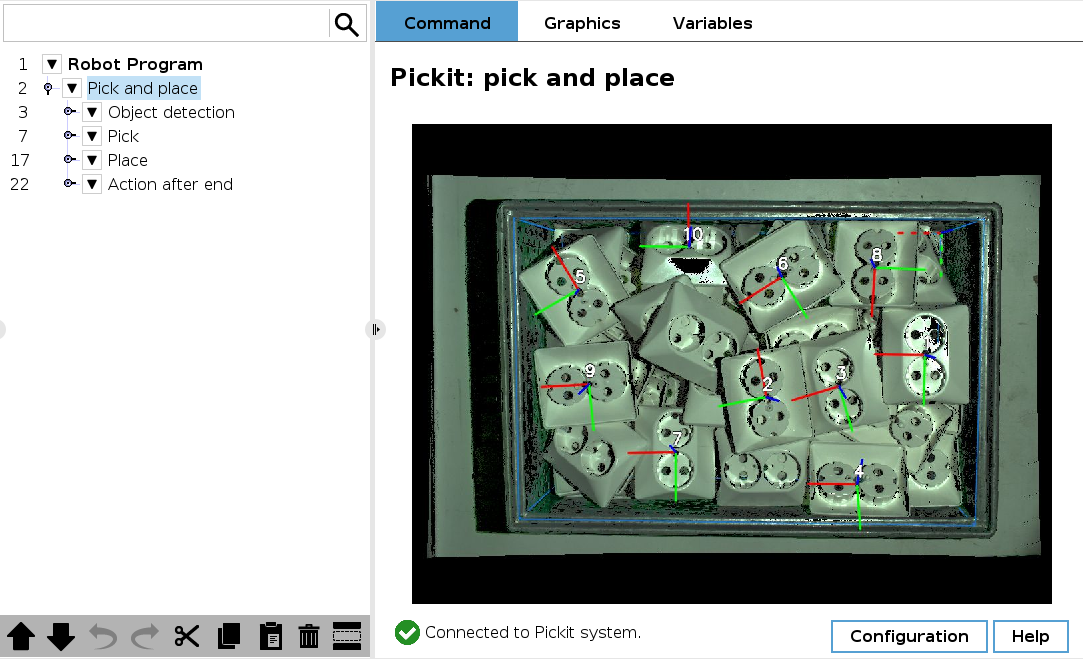
The recommended way of interacting with Pickit is by using the Pickit Pick and place template, which is a ready-to-use program node that performs object detection, picking and placing. Being highly configurable, it provides the necessary flexibility for covering most applications. If your application does not follow a standard flow, and the template does not cover the behavior you want, you can use the low-level URCap interface.
Example robot programs
Tip
You can learn about the main ideas behind the Pickit-UR integration by watching this video tutorial.