Single pose calibration
Warning
Single pose calibration can be less accurate than multi poses calibration. Use it only in the infrequent case where the workspace might be too limited to detect the calibration plate from multiple viewpoints.
By default, single-pose calibration is not exposed in the web interface. To enable it, open the Settings, navigate to Advanced settings > Calibration and turn on the Enable advanced calibration settings toggle.
In single pose calibration, the robot shows the calibration plate to Pickit from a single viewpoint, and requires the following restrictions to be satisfied:
Fixed camera mount. This method is not compatible with a robot-mounted camera.
The robot flange (or tool changer) complies with one of the following standards:
ISO 9409-1-50-4-M6 (50mm diameter)
ISO 9409-1-31.5-4-M5 (31.5mm diameter)
The location of the calibration plate with respect to the robot flange must be exactly known.
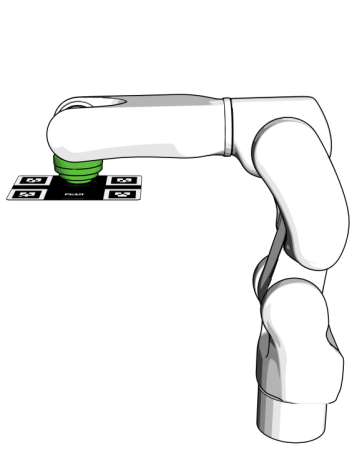
Mounting the calibration plate
The advantage of calibrating from a single viewpoint comes at the cost of Pickit needing to know how the calibration plate is mounted with respect to the robot flange. Therefore, the plate should be mounted to the flange as specified in Installing the Pickit calibration plate.
Determining the helper transformation
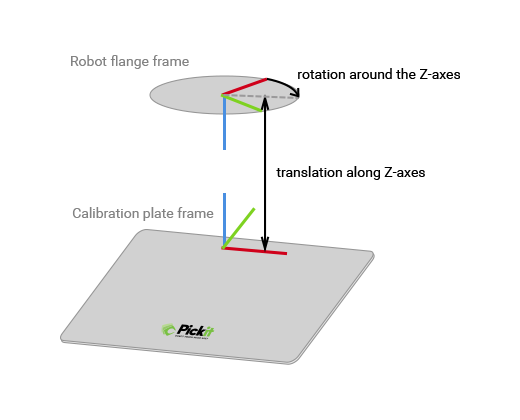
In the Pickit web interface, you need to specify the helper transformation, which is the transformation between the robot flange frame and the calibration plate frame. The latter is pictured below.
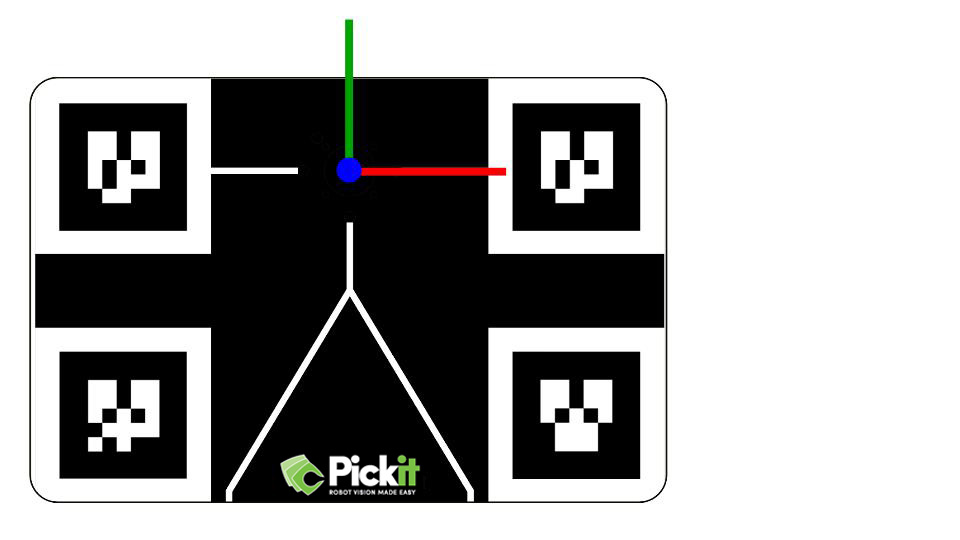
When the calibration plate is correctly mounted, this transformation consists of a translation and a rotation about the flange Z-axis.
If the calibration plate is screwed directly to the flange, and oriented according to Installing the Pickit calibration plate, the helper transformations in the table below apply, for the following robot brands:
Robot brand |
Translation in Z |
Rotation around Z |
|---|---|---|
Universal robots |
0 mm |
45 ° |
Fanuc |
0 mm |
135 ° |
KUKA |
0 mm |
-45 ° |
Stäubli |
0 mm |
135 ° |
ABB |
0 mm |
-45 ° |
Yaskawa |
0 mm |
-45 ° |
If the calibration plate is attached to the robot flange through a tool changer or a tool, then the translation along Z is the distance between the plate and the robot flange.
Calibrating from the web interface
Single pose calibration is not exposed by default in the Pickit web interface.
To enable it, go to the Settings page of the web interface top bar, and in the Advanced settings enable the Advanced calibration settings.
To perform a new calibration, click on Start calibration, and follow the steps of the calibration wizard.
Select the camera mount and robot type used in your application and set the calibration method to Single Pose Calibration.
Define the helper transformation, and confirm that the calibration plate is visible in the camera view.
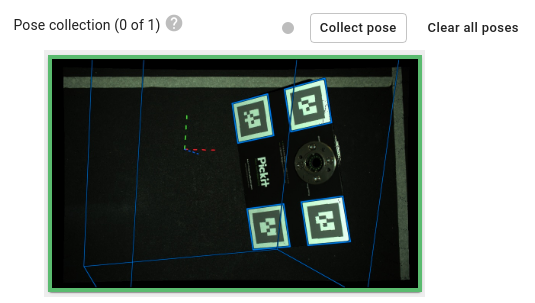
Collect the calibration pose. This step is similar to that of multi poses calibration, with the only difference that a single pose is collected.
Validate calibration. In this last step, you can optionally check the correctness of the calibration result (learn more).
Calibrating from the robot
If you perform calibration often, it’s possible to run calibration autonomously from the robot, without using the Pickit web interface. Refer to the example calibration program, and the documentation of your robot integration to learn more.