Robot tool model
Pickit allows to model the robot tool that is used for picking. Defining a tool model is not mandatory, but highly recommended for the following reasons:
In constrained picking scenarios like bin picking, it’s possible to prevent collisions between the robot tool and obstacles in the picking area.
When defining pick points, it’s helpful to visualize the robot tool with respect to the object to confirm the correct placement of a pick point.
Attention
Pickit is not aware of the robot Tool Center Point (TCP) definition. Make sure that you define a correct TCP in your robot, such that the real tool and the Pickit model are well aligned.
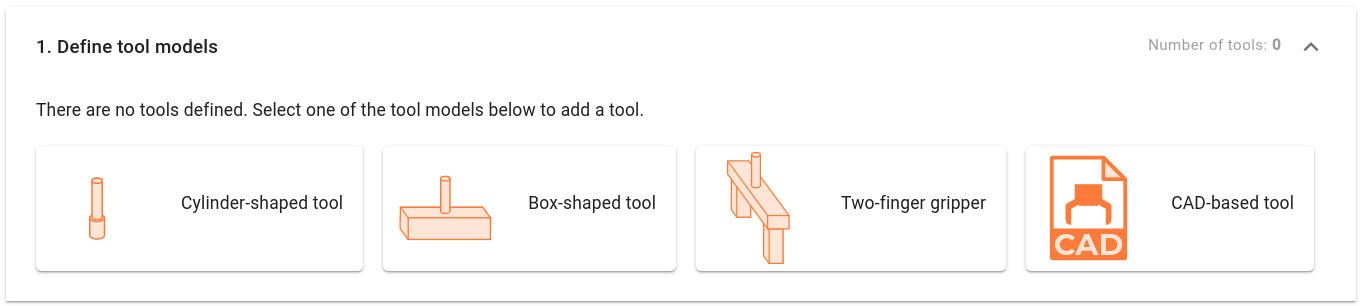
The Picking page exposes different alternatives for defining the robot tool model.
Tip
Regardless of your choice for robot tool model, it is recommended to follow these best practices for correct and efficient collision prevention.
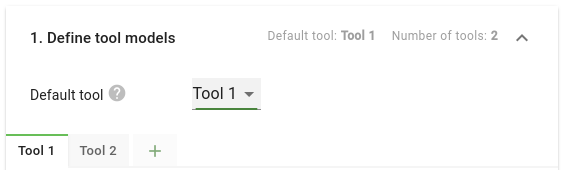
If your application requires it, it’s possible to create multiple tool models, and assign different tools to different pick points. A common example would be a two-finger gripper used with different opening distances depending on the selected pick point.
When multiple tools exist, the default tool represents the tool that will be selected when a new pick point is created.
Generic tool model
Pickit provides the following general purpose models that closely resemble commonly used tools:
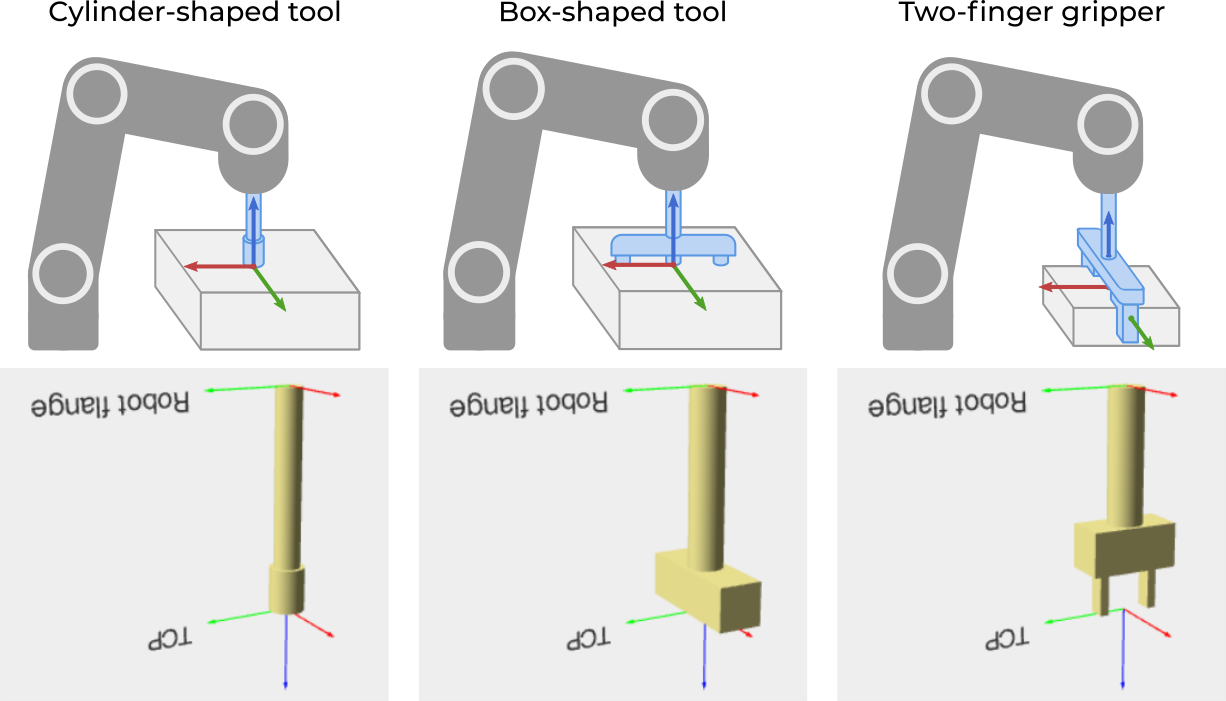
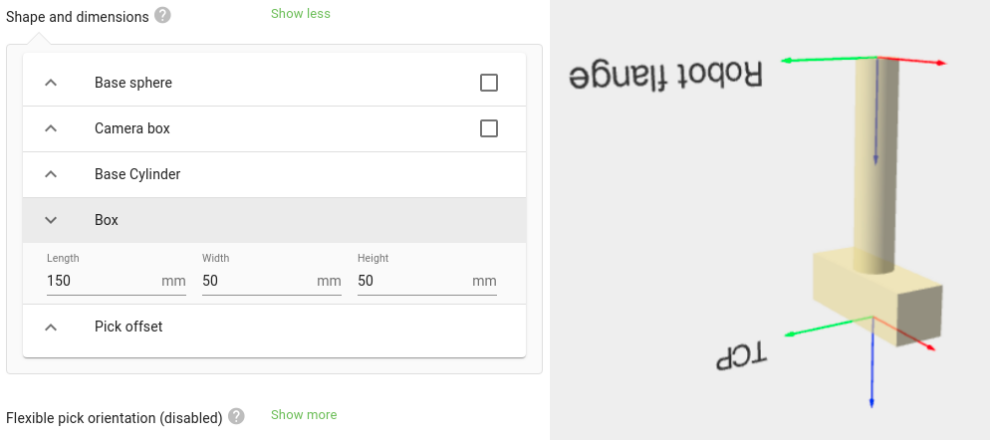
It is possible to modify a tool’s characteristic dimensions, as well as adapt its relative distance and orientation with respect to an object’s pick point. The image below shows the tool model editor for the Box-shaped tool.
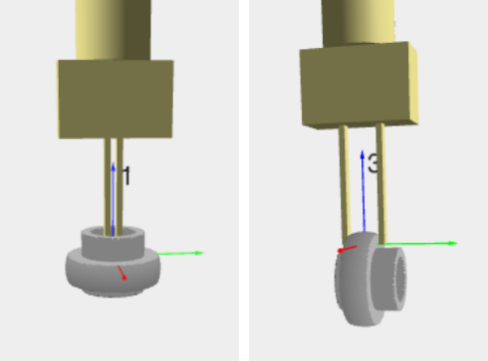
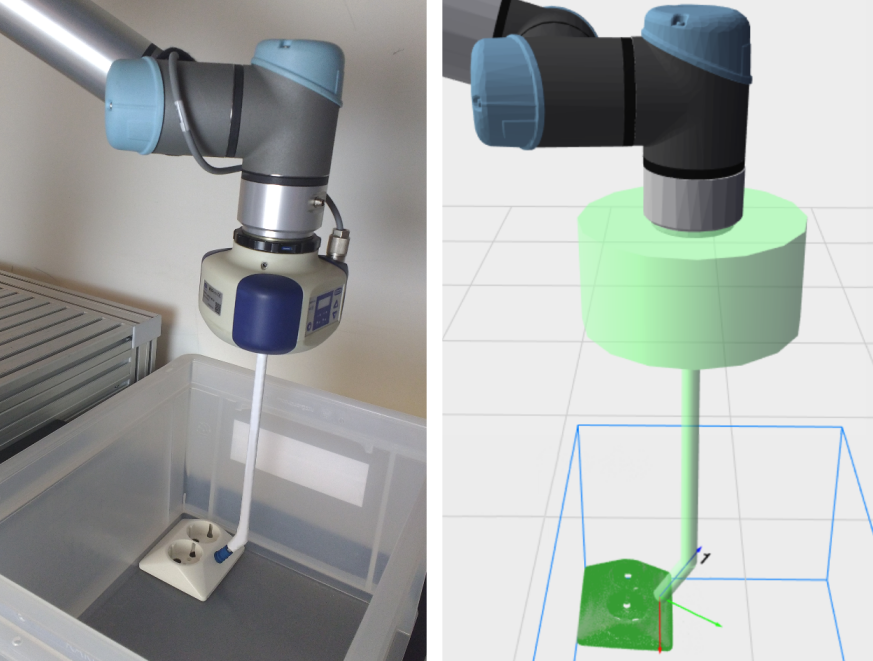
For an easier access to tilted parts in a bin, some applications use tools that are not straight, but bent under an angle close to the grasping point. In order to cover such tools, Pickit allows adding a slanted end to the cylinder-shaped tool model.
Pickit billet picker
Tool models with full software support for the six variants of the Pickit billet picker can be loaded with a single click. A generic model of a passive hinge gripper is also included.
These models are included when the smart gripper license module is present.

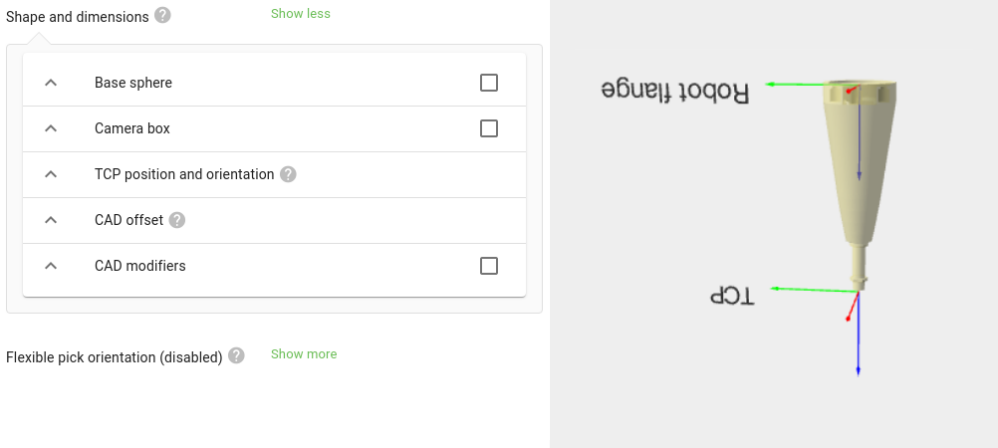
CAD-based tool model
If you have a CAD file of the tool, you can directly upload it to Pickit. This is a very convenient way to get your robot tool model into Pickit, as you only need to specify:
The CAD file to upload along with the units in which the geometry is represented.
The location of the Tool Center Point (TCP) with respect to the flange.
The CAD offset, or the location of the CAD model origin with respect to the flange frame. When the CAD origin coincides with the robot flange frame (recommended), the offset is zero.
CAD modifiers (optional):
The mesh clipping offset, which cuts off the bottom-most part of the CAD model by a user-defined amount. This is useful for not including parts of the CAD model close to the TCP in collision checks.
The face count reduction, for simplifying the CAD geometry and producing faster (but coarser) collision checks.
Note
Pickit only supports the stl format for tool models. This format is widely supported and most CAD design editors can export CAD into stl format. There are also free online converters available on the Internet which can help you in doing so.
Optional tool configuration
Flexible pick orientation
In practice, many tools can tolerate some variation with respect to the nominal pick orientation without compromising pick success. Pickit represents these variations as a tool’s flexible pick orientation, and taking advantage of them can increase the likelihood that an object is pickable.
Additional collision geometries
The robot tool model can also include additional optional geometries:
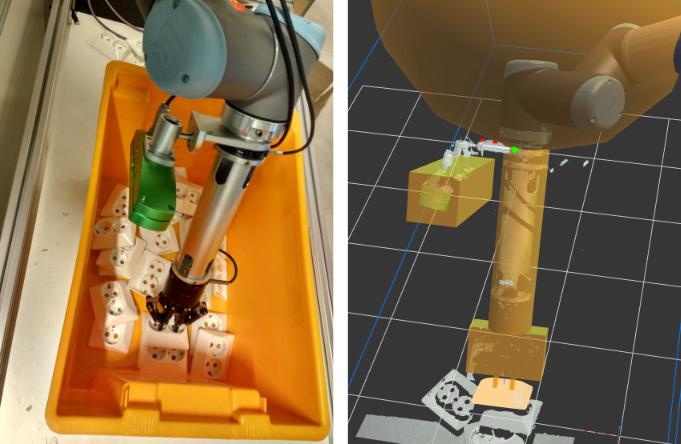
The Base sphere, which typically contains the robot wrist, helps preventing collisions when part of the robot enters (or gets very close to) the bin.
The Camera box, which represents the camera volume in robot-mounted camera setups, makes sure that the mounted camera does not suffer any collisions.
The example below compares the actual robot tool with the model used by Pickit. It shows the two-finger-gripper generic model representing a gripper attached to a long extension cylinder. It uses both the optional Camera box and Base sphere around the robot wrist.