Collision prevention
In constrained picking scenarios like bin picking, it is important to prevent the robot tool from colliding with the bin or other obstacles, such that the application runs without interruption.
In the Picking page, under Prevent collision with tool, one can check whether reaching a pick point with a specific robot tool would result in collision. If picking an object would lead to a collision, the object is labeled as unpickable and is not sent to the robot. In the Pickit web interface, unpickable objects are displayed in orange in the Objects view and Objects table.
Warning
Pickit collision-checks the pick point, not the robot trajectory that would lead to it.
Collision obstacles
For collision prevention to take place, the user needs to define a robot tool model, and specify the obstacles we want to prevent collisions against. There are two main sources of obstacles that can be independently enabled:
Camera scene points: Contains the 3D scene visible to the camera (what the 3D view shows). This is mainly relevant for preventing collisions with the contents of a bin, that is, parts other than the one being picked. These obstacles are updated on each detection run, as they change over time as picking makes progress. Apart from bin contents, the camera might also capture parts of the bin or its surroundings.
Collision environment Contains user-defined obstacles that don’t change over time. The most common modeled obstacle is the bin, which is often not fully visible from the camera viewpoint. It is also possible to model obstacles surrounding the bin (or picking area, when there is no bin). Lean more in the article on how to model the collision environment.
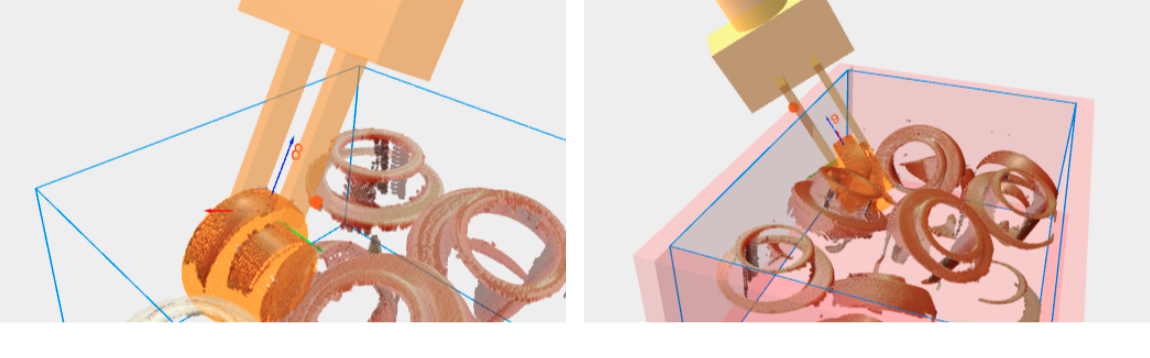
The examples below show a pick point being rejected due to collisions between the robot tool and camera scene points (left), and between the robot tool and the bin (right). The orange dot indicates where collision takes place, and in the left image the bin is additionally highlighted in orange.
Tip
When collisions checks with the bin are enabled, it’s important to have a correctly defined bin.
Tip
Refer to the How to get more pickable parts article to learn about the different strategies supported by Pickit to increase the number of pickable parts produced in a single detection.