Objects table
Overview
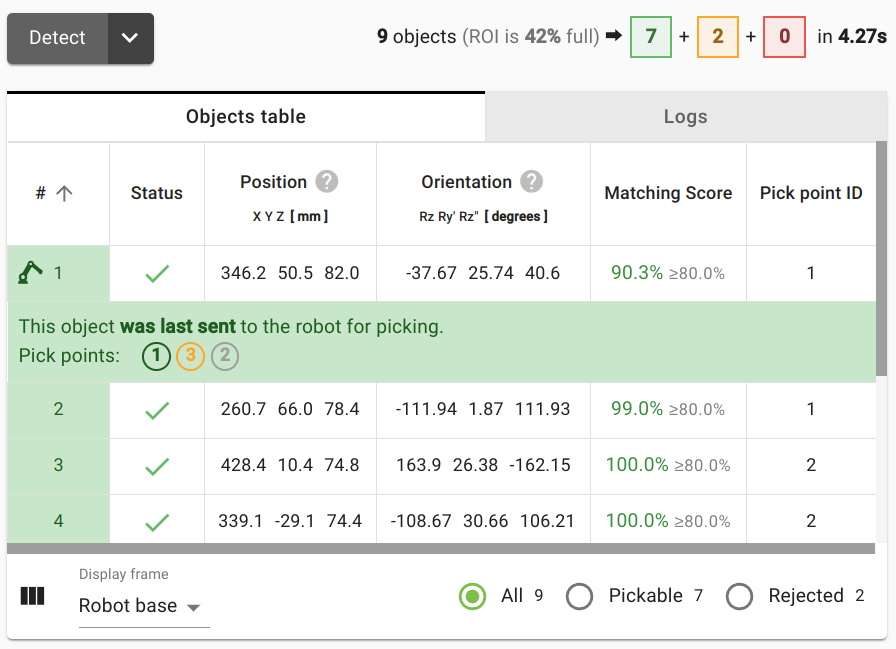
The Pickit objects table gives a quantitative overview of detection results at a glance. Visual and qualitative information about detection results is provided by the complementary Viewer component.
The following color code is used to classify detections:
Green - Pickable object: These are the only objects that can be sent to the robot for picking.
Orange - Unpickable object: Pickit successfully detected the object, but it’s not pickable.
Red - Invalid object: The object failed to pass a detection quality check, such as the matching score being too low.
On top of the table, you can see a summary of all detected objects, the ROI emptiness and the detection time.


Detect 10 times
Detect continuously
Detect until valid object
Detect until no valid object
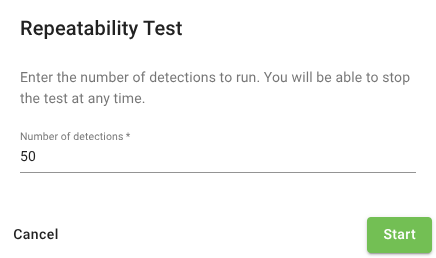
Run repeatability test
With the repeatability test, you can quickly assess the repeatability of detections by running a number of detection runs and analyzing the statistics of the results, such as the success rate and the mean/max position and orientation errors (learn more).
Detailed insights
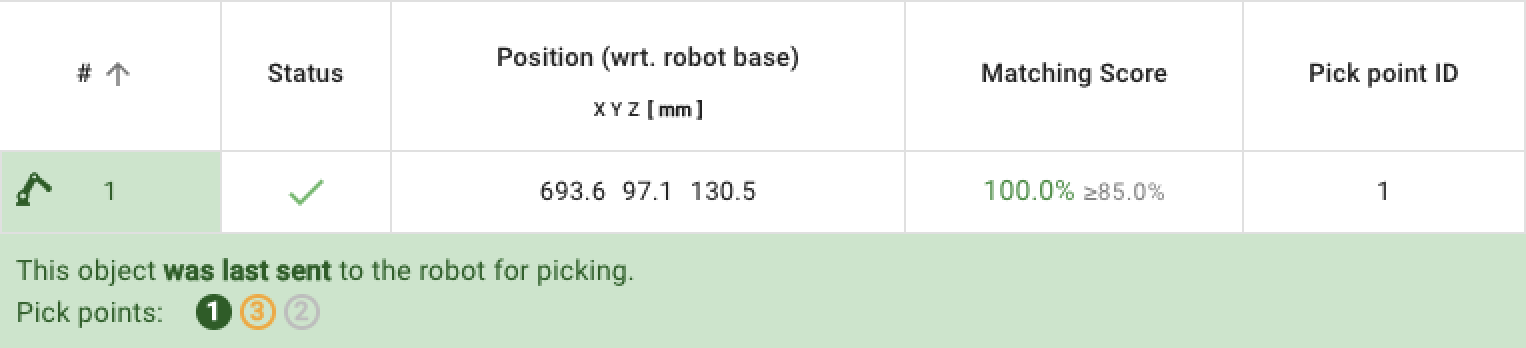
You can learn more about a specific object by clicking on an individual table row. For example, for object 1 below, pick point 1 was selected after testing pick point 3, which is unpickable. Pick point 2 was not tested for pickability.
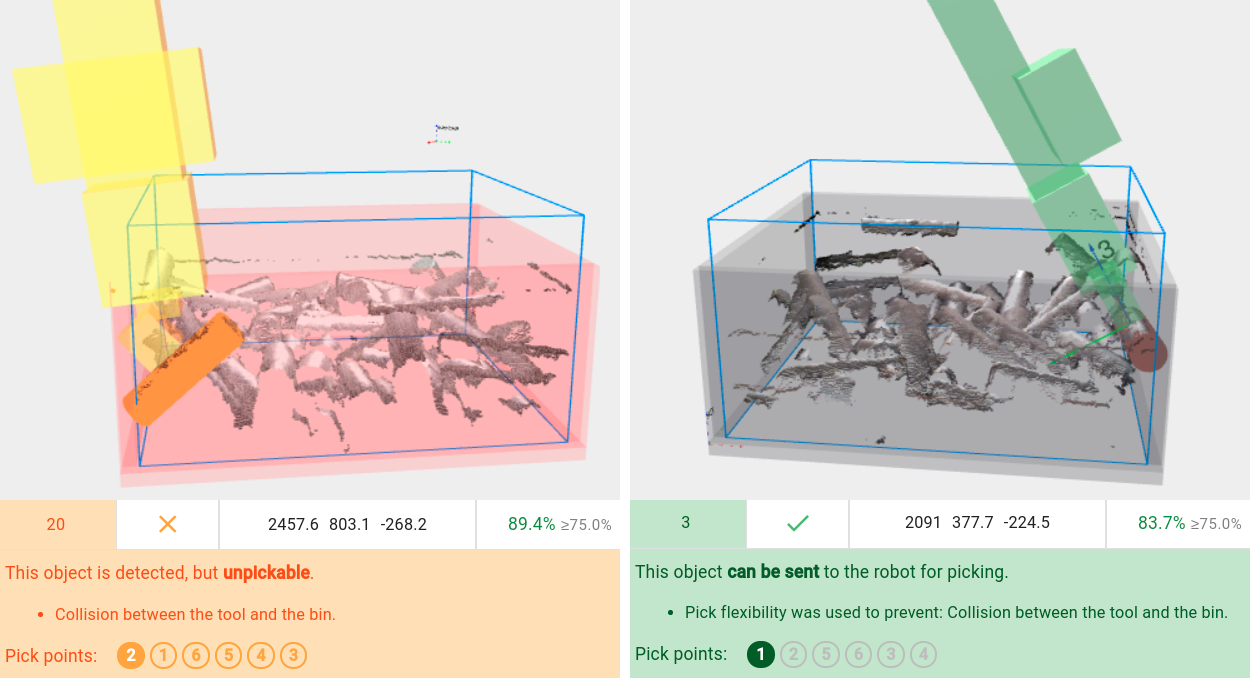
This detailed information can be used in combination with the viewer to answer questions like why is this part unpickable?, or why is this part picked like that? In the examples below, we see:
Left: The part is unpickable part due to a collision with the bin. There is not enough pick flexibility to produce a valid pick.
Right: The part is pickable, but the preferred pick (vertical tool) collides with the bin. Pick flexibility is used to prevent this collision.
What to show, and how
Below the table, there are some controls that allow filtering how much information is displayed in it.

Object status filters
The filters to the right filter what type of matches are displayed (in the table and also in the Objects view), such as all objects, only pickable ones, or only rejected ones.
Display frame
The Display frame drop-down allows selecting the coordinates in which to display object position and orientation.
Possible options are the robot base, ROI, or the expected object location (if enabled).
The coordinates in which object detections are communicated to the robot are highlighted with a robot icon next to it.
Note
The Display frame only modifies the coordinates in which the web interface displays object position and orientation.
If you instead want to change the coordinates in which object position and orientation are communicated to the robot, please set the object reference frame.
Table columns
The icon on the left with three vertical bars expands to select which table columns are shown, such that you can tune the display of results to your needs. The following values can be shown:
Object number: Pickable objects will be sent to the robot in this order. The object that was last sent to the robot for picking is indicated by a robot icon. Learn more about specifying the object order here.
Status: To discriminate between pickable, unpickable, and invalid objects.
Position: Position coordinates in the specified
Display frame.Orientation: Orientation coordinates in the specified
Display frame.Matching score.
Points: Number of matched model points.
Model ID: ID of the matched model (specific to Pickit Teach).
Pick point ID: ID of the selected pick point.
Dimensions: Object dimensions (specific to Pickit Flex).
Note
The units and precision with which to display the object position, as well as the orientation representation can be set in the Units settings.
Finally, it is possible to sort object detections according to any of the columns. By clicking on any column header, you can sort by the contents of that column in increasing (↑ icon is shown) or decreasing (↓ icon is shown) order. The default is to sort by increasing object number.
The below example sorts detections by decreasing Matching score.
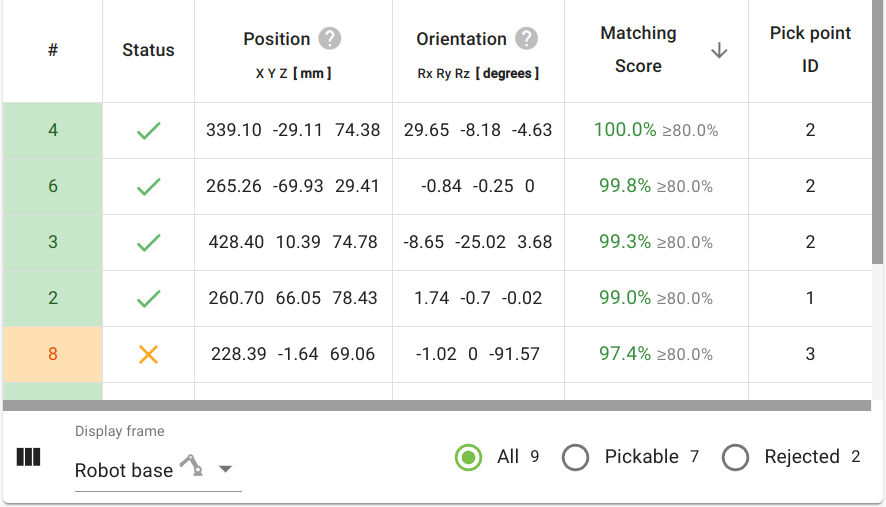
Note that this sorting only affects the table visualization. The picking order will always be determined by the object number.